ระบบส่งกำลังแบบเฟืองตัวหนอนประกอบด้วยตัวหนอนและล้อตัวหนอน โดยทั่วไปแล้วตัวหนอนจะเป็นส่วนที่ทำงาน เฟืองตัวหนอนมีเกลียวขวาและเกลียวซ้ายเหมือนกัน ซึ่งเรียกว่าเฟืองตัวหนอนขวาและเฟืองตัวหนอนซ้ายตามลำดับ ตัวหนอนเป็นเฟืองที่มีฟันเกลียวหนึ่งซี่หรือมากกว่านั้น ซึ่งจะขบกับล้อตัวหนอนเพื่อสร้างคู่เฟืองเพลาแบบเหลื่อมกัน พื้นผิวการหมุนสามารถเป็นทรงกระบอก ทรงกรวย หรือทรงกลม และมีสี่ประเภท ได้แก่ เฟืองตัวหนอนอาร์คิมีดีส เฟืองตัวหนอนแบบอินโวลูต เฟืองตัวหนอนแบบโปรไฟล์ตรงปกติ และเฟืองตัวหนอนทรงกระบอกหุ้มแบบเรียว
ข้อดีของระบบส่งกำลังแบบเฟืองตัวหนอน
✦ อัตราส่วนการส่งกำลังแบบขั้นเดียวมีค่าสูง โดยทั่วไป i=10~100 ในกลไกการกำหนดดัชนีสำหรับการส่งกำลัง ค่าสูงสุดอาจสูงกว่า 1500
✦ การจับคู่แบบเดียวกันนี้เป็นการสัมผัสเชิงเส้น ซึ่งสามารถรับกำลังไฟฟ้าสูงได้
✦ โครงสร้างกะทัดรัด การส่งกำลังราบรื่น และเสียงรบกวนต่ำ
✦ เมื่อมุมยกของตัวหนอนน้อยกว่ามุมเสียดทานเทียบเท่าระหว่างเฟือง จะเกิดการล็อกตัวเองด้วยจังหวะสวนทาง กล่าวคือ มีเพียงตัวหนอนเท่านั้นที่สามารถขับเคลื่อนล้อหนอนได้ ไม่ใช่ล้อหนอน
ข้อเสียของระบบขับเคลื่อนเฟืองตัวหนอน
✦เมื่อแกนทั้งสองตั้งฉากกัน ความเร็วเชิงเส้นของจุดเชื่อมต่อล้อทั้งสองจึงตั้งฉากกัน ทำให้ความเร็วในการเลื่อนสัมพัทธ์สูง เกิดความร้อนและสึกหรอได้ง่าย
✦ประสิทธิภาพต่ำ โดยทั่วไปอยู่ที่ 0.7 ถึง 0.8; เฟืองตัวหนอนที่มีระบบล็อคตัวเองจะมีประสิทธิภาพต่ำกว่านั้นอีก โดยทั่วไปต่ำกว่า 0.5
ทำได้ไหมมอเตอร์สเต็ปเปอร์เฟืองตัวหนอนจำเป็นต้องมีคุณสมบัติการล็อกตัวเองหรือไม่?
ไม่ มีข้อกำหนดเบื้องต้นอยู่ เมื่อมุมนำ < มุมเสียดทานมอเตอร์สเต็ปเปอร์เฟืองตัวหนอนสามารถล็อกตัวเองได้
โดยปกติแล้ว เมื่อเลือกใช้มอเตอร์สเต็ปเปอร์แบบลดเกียร์ ผู้ใช้จะต้องใช้ระบบป้องกันไฟดับหรือเบรกมอเตอร์ด้วย ดังนั้นมอเตอร์ลดเกียร์จึงมักถูกเลือกใช้พร้อมเบรกเพื่อให้สามารถหยุดได้ แต่ไม่ได้หมายความว่าจะหยุดสนิท ยังคงมีแรงเฉื่อยอยู่บ้าง
การล็อกตัวเองคืออะไร?หลักการของการล็อกตัวเองคือ ไม่ว่าจะใช้แรงมากแค่ไหนก็ไม่สามารถสตาร์ทได้ ไม่ว่าจะมีแรงเฉื่อยมากแค่ไหน ตราบใดที่ส่วนที่ทำงานอยู่หยุดการทำงาน เครื่องจักรทั้งหมดก็จะเบรกได้ มอเตอร์สเต็ปเปอร์แบบเฟืองตัวหนอนมีคุณสมบัติการล็อกตัวเองนี้ มอเตอร์สเต็ปเปอร์แบบเฟืองธรรมดาไม่มีคุณสมบัติการล็อกตัวเอง แต่ตัวลดเกียร์แบบเฟืองตัวหนอนที่มีอัตราส่วนความเร็ว 1:30 ขึ้นไปมีคุณสมบัติการล็อกตัวเองที่เชื่อถือได้ และยิ่งอัตราส่วนการลดเกียร์สูงเท่าไร คุณสมบัติการล็อกตัวเองก็จะยิ่งดีขึ้นเท่านั้น
จะเลือกอัตราส่วนลดอย่างไรเพื่อให้มั่นใจได้ว่ามอเตอร์สเต็ปเปอร์แบบเฟืองตัวหนอนทำงานได้อย่างล็อคตัวเอง?
1. ค่าสัมประสิทธิ์แรงเสียดทานของเฟืองตัวหนอนคือ 0.6 มุมนำของเฟืองตัวหนอนน้อยกว่า 3°29′11″ ซึ่งจะล็อคตัวเองได้ และในทางกลับกัน
2. ค่าสัมประสิทธิ์แรงเสียดทานของเฟืองตัวหนอนคือ 0.7 มุมนำของเฟืองตัวหนอนน้อยกว่า 4°03′57″ ซึ่งหมายถึงการล็อคตัวเอง และในทางกลับกัน
3. เมื่อค่าสัมประสิทธิ์แรงเสียดทานของเฟืองตัวหนอนเท่ากับ 0.8 มุมนำของเฟืองตัวหนอนจะน้อยกว่า 4°38′39″ นั่นคืออยู่ในสภาวะล็อกตัวเอง และในทางกลับกัน
เมื่อมุมนำของเฟืองตัวหนอนน้อยกว่ามุมเสียดทานเทียบเท่าระหว่างฟันของล้อเฟืองที่ขบกัน กลไกมอเตอร์สเต็ปเปอร์ลดรอบจะล็อกตัวเอง ซึ่งสามารถล็อกตัวเองแบบย้อนกลับได้ กล่าวคือ เฟืองตัวหนอนเท่านั้นที่สามารถขับเคลื่อนล้อเฟืองตัวหนอนได้ แต่ล้อเฟืองตัวหนอนไม่สามารถขับเคลื่อนเฟืองตัวหนอนได้ โดยทั่วไปในการออกแบบเครื่องจักรหนัก นักออกแบบมักจะใช้กลไกเฟืองตัวหนอนแบบล็อกตัวเอง เนื่องจากระบบล็อกตัวเองแบบย้อนกลับมีบทบาทสำคัญมากในการป้องกันความปลอดภัย
สูตรการคำนวณของเฟืองตัวหนอนและเฟืองเกียร์ตัวหนอน
1. อัตราทดเกียร์ = จำนวนฟันเฟืองตัวหนอน ÷ จำนวนหัวเฟืองตัวหนอน
2. ระยะห่างระหว่างศูนย์กลาง = (ระยะห่างของเฟืองตัวหนอน + ระยะห่างของเฟืองตัวหนอน) ÷ 2
3. เส้นผ่านศูนย์กลางของเฟืองตัวหนอน = (จำนวนฟัน + 2) × ค่าสัมบูรณ์
4. ระยะห่างของฟันเฟืองตัวหนอน = โมดูล × จำนวนฟัน
5. ระยะห่างระหว่างเกลียวหนอน = เส้นผ่านศูนย์กลางภายนอกของหนอน - 2 × โมดูล
6. ตัวนำหนอน = π × โมดูล × หัว
7. มุมเกลียว (มุมนำทาง) tgB = (โมดูลัส × จำนวนหัว) ÷ ระยะห่างของตัวหนอน
8. ระยะนำของหนอน = π × โมดูล × หัว
9. โมดูลัส = เส้นผ่านศูนย์กลางของวงกลมดัชนี / จำนวนฟัน
จำนวนหัวของหนอน: หนอนหัวเดียว (มีเกลียวเพียงหนึ่งเดียวบนตัวหนอน กล่าวคือ หนอนหมุนหนึ่งรอบต่อสัปดาห์ และวงล้อหนอนหมุนผ่านฟันหนึ่งซี่); หนอนสองหัว (มีเกลียวสองเกลียวบนตัวหนอน กล่าวคือ หนอนหมุนหนึ่งรอบต่อสัปดาห์ และวงล้อหนอนหมุนผ่านฟันสองซี่)
ค่าโมดูลัสคือขนาดของเกลียวบนสกรู กล่าวคือ ยิ่งค่าโมดูลัสมากเท่าไร เกลียวบนสกรูก็จะยิ่งใหญ่ขึ้นเท่านั้น
ปัจจัยด้านเส้นผ่านศูนย์กลางคือความหนาของสกรู
โมดูลัส: วงกลมกำหนดตำแหน่งของเฟืองเป็นเกณฑ์มาตรฐานสำหรับการออกแบบและคำนวณขนาดของแต่ละส่วนของเฟือง โดยที่เส้นรอบวงของวงกลมกำหนดตำแหน่งของเฟือง = πd = zp ดังนั้นเส้นผ่านศูนย์กลางของวงกลมกำหนดตำแหน่งเฟืองคือ...
d=zp/π
เนื่องจาก π เป็นจำนวนอตรรกยะในสมการข้างต้น จึงไม่สะดวกที่จะใช้เครื่องหมายวงกลมเป็นจุดอ้างอิง เพื่อความสะดวกในการคำนวณ การผลิต และการตรวจสอบ อัตราส่วน p/π จึงถูกกำหนดขึ้นโดยพลการเป็นค่าที่ง่ายกว่า และอัตราส่วนนี้เรียกว่า โมดูลัส (ค่าสัมบูรณ์) ซึ่งแสดงด้วยสัญลักษณ์ m
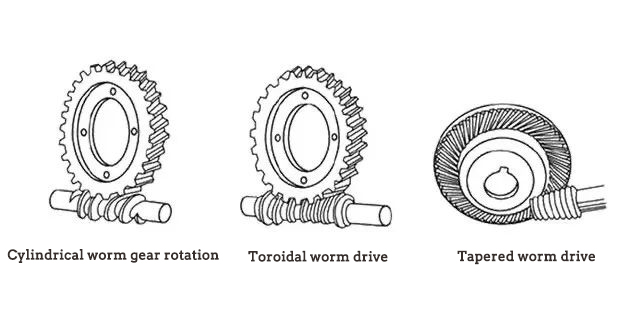
ประเภทของเฟืองตัวหนอน
ตามรูปทรงที่แตกต่างกันของตัวหนอน สามารถแบ่งตัวหนอนออกเป็น ตัวหนอนทรงกระบอก ตัวหนอนวงแหวน และตัวหนอนทรงกรวย โดยตัวหนอนทรงกระบอกเป็นแบบที่ใช้กันอย่างแพร่หลายที่สุด
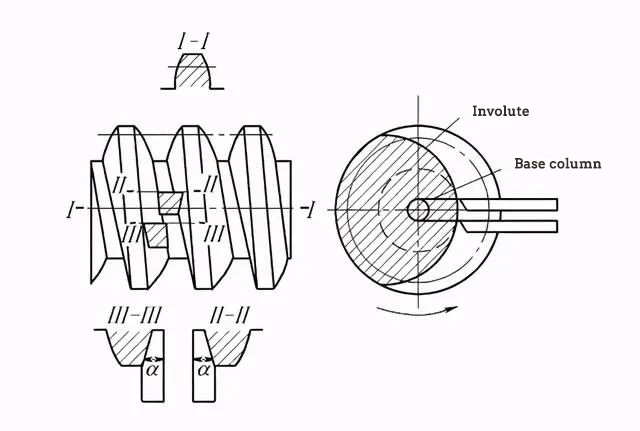
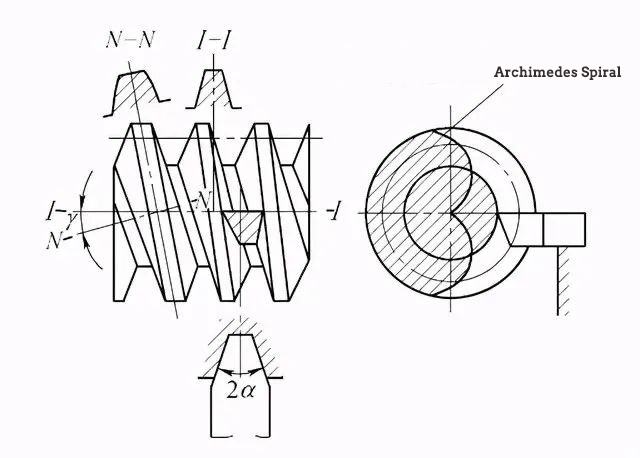
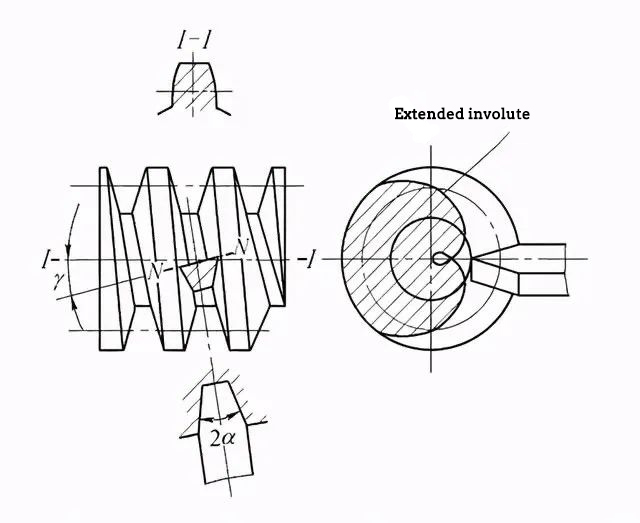
โดยทั่วไปแล้ว เฟืองตัวหนอนทรงกระบอกธรรมดาจะถูกตัดด้วยเครื่องกลึงโดยใช้เครื่องมือกลึงที่มีใบมีดตรง การเปลี่ยนแปลงตำแหน่งการติดตั้งเครื่องมือและเครื่องมือที่ใช้ จะทำให้ได้เฟืองตัวหนอนสี่ประเภทที่มีรูปทรงฟันแตกต่างกันในหน้าตัดของแกนตั้ง ได้แก่ เฟืองตัวหนอนแบบอินโวลูต (แบบ ZI) เฟืองตัวหนอนแบบอาร์คิมีดีส (แบบ ZA) เฟืองตัวหนอนแบบโปรไฟล์ตรงปกติ (แบบ ZN) และเฟืองตัวหนอนทรงกระบอกแบบเรียว (แบบ ZK)
หนอนม้วนตัว (ชนิด ZI)- ระนาบของใบมีดสัมผัสกับฐานกระบอกของเฟืองตัวหนอน และฟันปลายมีลักษณะโค้งเข้าด้านใน เหมาะสำหรับความเร็วสูงและกำลังที่มากขึ้น
หนอนอาร์คิมีเดียน (ชนิด ZA)- รูปทรงฟันที่ตั้งฉากกับระนาบแกนจะเป็นแบบสกรูอาร์คิมีดีส และรูปทรงฟันในระนาบที่ผ่านแกนจะเป็นแบบเส้นตรง มีกระบวนการผลิตที่เรียบง่ายและความแม่นยำต่ำ (เฟืองตัวหนอนแบบโปรไฟล์เส้นตรงตามแนวแกน)
หนอนโปรไฟล์ตรงปกติ (ZN)- สามารถใช้ในการลับฟันเฟืองด้วยล้อเจียรแบบดัดแปลง กระบวนการไม่ซับซ้อน มักใช้กับเฟืองตัวหนอนหลายหัว ประสิทธิภาพการส่งกำลังสูงถึง 0.9
เนื่องจากคุณมีความเข้าใจเบื้องต้นเกี่ยวกับการส่งสัญญาณอยู่แล้วหลักการของมอเตอร์เกียร์หนอนหากมีสิ่งใดที่ต้องการสื่อสารเพิ่มเติม โปรดแจ้งให้ทราบติดต่อเรา!
เราทำงานร่วมกับลูกค้าอย่างใกล้ชิด รับฟังความต้องการของพวกเขา และดำเนินการตามคำขอ เราเชื่อว่าพื้นฐานของความร่วมมือที่เป็นประโยชน์ต่อทั้งสองฝ่ายคือคุณภาพของผลิตภัณฑ์และการบริการลูกค้า
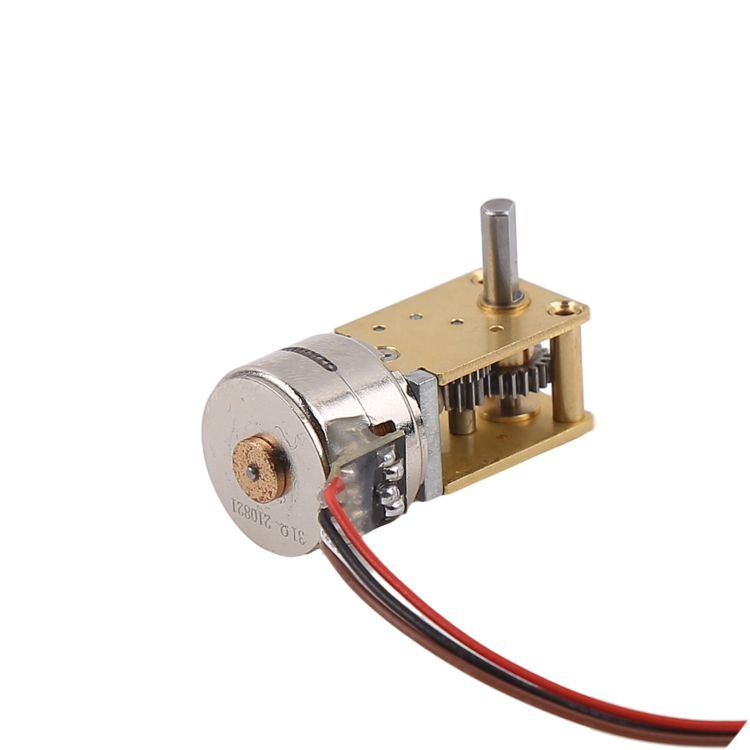
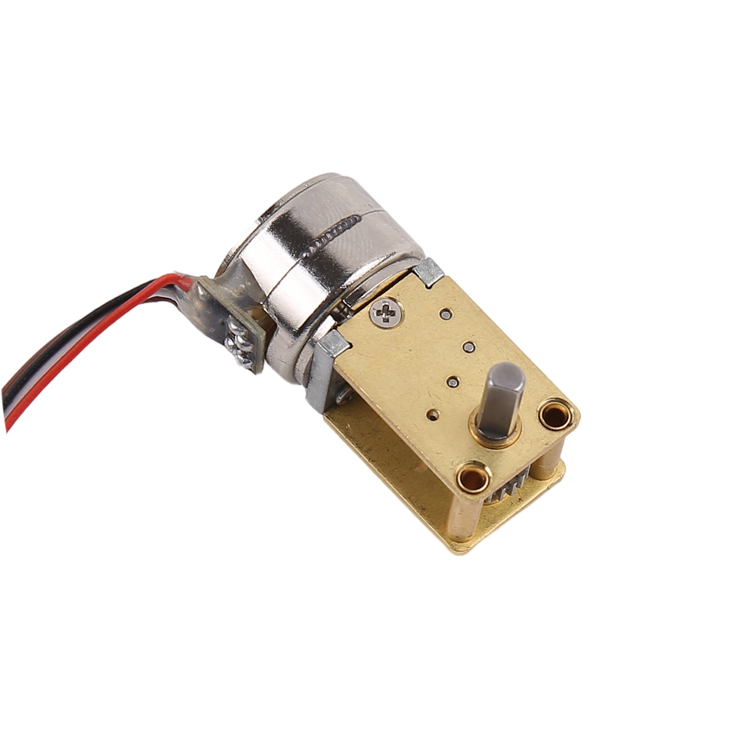
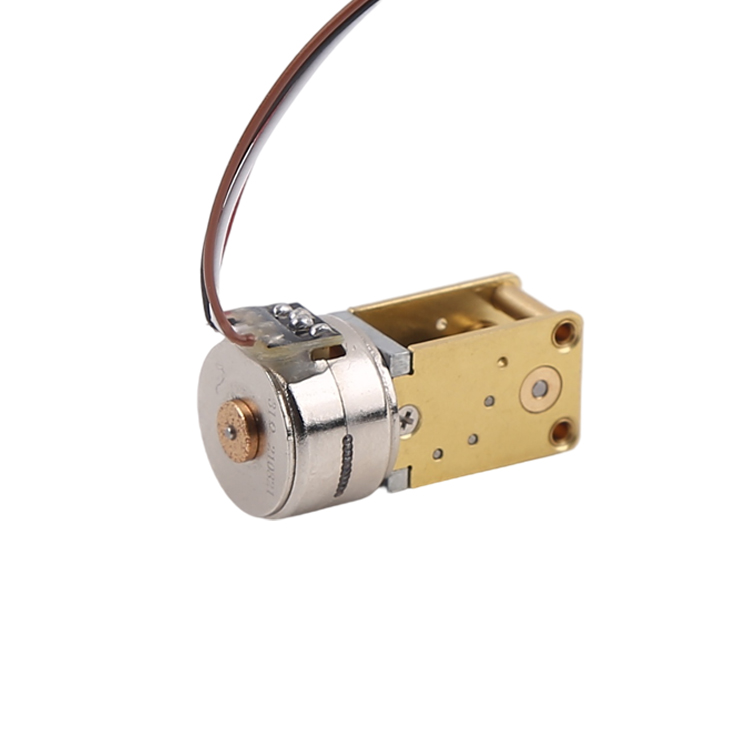
บริษัท Changzhou Vic-tech Motor Technology จำกัด เป็นองค์กรวิจัยและพัฒนาด้านมอเตอร์ระดับมืออาชีพ ที่มุ่งเน้นการวิจัยและพัฒนามอเตอร์ โซลูชันแบบครบวงจรสำหรับการใช้งานมอเตอร์ ตลอดจนการแปรรูปและการผลิตผลิตภัณฑ์มอเตอร์ บริษัทฯ มีความเชี่ยวชาญในการผลิตมอเตอร์ขนาดเล็กและอุปกรณ์เสริมมาตั้งแต่ปี 2011 ผลิตภัณฑ์หลักของเรา ได้แก่ มอเตอร์สเต็ปเปอร์ขนาดเล็ก มอเตอร์เกียร์ มอเตอร์แบบมีเกียร์ มอเตอร์ขับเคลื่อนใต้น้ำ และตัวขับและตัวควบคุมมอเตอร์

ทีมงานของเรามีประสบการณ์มากกว่า 20 ปีในการออกแบบ พัฒนา และผลิตมอเตอร์ขนาดเล็ก และสามารถพัฒนาผลิตภัณฑ์และให้ความช่วยเหลือด้านการออกแบบแก่ลูกค้าตามความต้องการพิเศษได้! ปัจจุบัน เราจำหน่ายสินค้าให้กับลูกค้าในหลายร้อยประเทศในเอเชีย อเมริกาเหนือ และยุโรป เช่น สหรัฐอเมริกา สหราชอาณาจักร เกาหลี เยอรมนี แคนาดา สเปน เป็นต้น ปรัชญาการดำเนินธุรกิจของเราคือ "ความซื่อสัตย์และน่าเชื่อถือ เน้นคุณภาพ" และค่านิยม "ลูกค้ามาก่อน" ซึ่งส่งเสริมการสร้างสรรค์นวัตกรรมที่มุ่งเน้นผลลัพธ์ การทำงานร่วมกัน และจิตวิญญาณขององค์กรที่มีประสิทธิภาพ เพื่อสร้าง "การสร้างและแบ่งปัน" เป้าหมายสูงสุดคือการสร้างมูลค่าสูงสุดให้แก่ลูกค้าของเรา
วันที่เผยแพร่: 30 มกราคม 2023