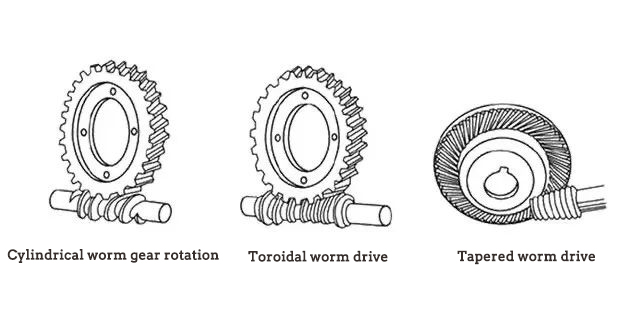
ระบบส่งกำลังแบบเฟืองตัวหนอนประกอบด้วยเฟืองตัวหนอนและเฟืองตัวหนอน โดยทั่วไปเฟืองตัวหนอนจะเป็นส่วนที่ทำงาน เฟืองตัวหนอนมีเกลียวด้านขวาและซ้ายเหมือนกัน ซึ่งเรียกว่าเฟืองตัวหนอนด้านขวาและซ้ายตามลำดับ เฟืองตัวหนอนคือเฟืองที่มีฟันเฟืองเกลียวหนึ่งซี่หรือมากกว่า ซึ่งประกอบเข้ากับเฟืองตัวหนอนเพื่อสร้างคู่เฟืองเพลาสลับ พื้นผิวการเลื่อนอาจเป็นรูปทรงกระบอก ทรงกรวย หรือวงกลม และมีสี่ประเภท ได้แก่ เฟืองตัวหนอนอาร์คิมิดีส เฟืองตัวหนอนแบบอินโวลูท เฟืองตัวหนอนโปรไฟล์ตรงปกติ และเฟืองตัวหนอนทรงกระบอกหุ้มเรียว
ข้อดีของระบบส่งกำลังแบบเฟืองตัวหนอน
✦ อัตราส่วนการส่งสัญญาณแบบขั้นตอนเดียวมีขนาดใหญ่ โดยทั่วไป i=10~100 ในกลไกการจัดทำดัชนีสำหรับการส่งกำลัง ค่าสูงสุดอาจสูงกว่า 1500
✦ การเชื่อมต่อแบบตาข่ายเดียวกันเป็นการสัมผัสแบบเส้นตรง ซึ่งสามารถทนต่อพลังงานขนาดใหญ่ได้
✦ โครงสร้างกะทัดรัด ส่งสัญญาณราบรื่น และเสียงรบกวนต่ำ
✦ เมื่อมุมยกของเฟืองหนอนมีค่าน้อยกว่ามุมเสียดทานที่เท่ากันระหว่างเฟืองทั้งสอง มันจะล็อคตัวเองด้วยจังหวะสวนทาง กล่าวคือ เฟืองหนอนเท่านั้นที่สามารถขับเคลื่อนเฟืองหนอนได้ ไม่ใช่เฟืองหนอน
ข้อเสียของระบบขับเคลื่อนแบบเฟืองตัวหนอน
✦ เนื่องจากมีแกนสองแกนตั้งฉากกัน ความเร็วเชิงเส้นของโหนดล้อทั้งสองจึงตั้งฉากกัน ดังนั้น ความเร็วการเลื่อนสัมพันธ์กันจึงมีมาก ง่ายต่อการเกิดความร้อนและสึกหรอ
✦ประสิทธิภาพต่ำ โดยทั่วไปอยู่ที่ 0.7 ถึง 0.8 ส่วนเฟืองตัวหนอนที่มีเฟืองตัวหนอนแบบล็อกอัตโนมัติจะมีประสิทธิภาพน้อยกว่า โดยทั่วไปจะต่ำกว่า 0.5
ทำมอเตอร์สเต็ปเปอร์แบบเฟืองตัวหนอนจำเป็นต้องมีประสิทธิภาพการล็อคอัตโนมัติหรือไม่?
ไม่ มีข้อกำหนดเบื้องต้น เมื่อมุมนำ < มุมเสียดทานมอเตอร์สเต็ปเปอร์แบบเฟืองตัวหนอนสามารถล็อคอัตโนมัติได้
โดยปกติ เมื่อเลือกมอเตอร์สเต็ปเปอร์ลดเกียร์ ผู้ใช้จะต้องใช้ระบบป้องกันไฟดับหรือมอเตอร์เบรก ดังนั้น มอเตอร์ลดเกียร์จะถูกเลือกพร้อมเบรกเพื่อให้บรรลุวัตถุประสงค์ในการหยุด แต่ไม่ได้หมายความว่าจะหยุดโดยสมบูรณ์ ยังคงมีแรงเฉื่อยอยู่เล็กน้อย
การล็อคตัวเองคืออะไร?แนวคิดของการล็อกตัวเองคือ ไม่ว่าจะออกแรงมากแค่ไหนก็ไม่สามารถสตาร์ทได้ ไม่ว่าจะมีแรงเฉื่อยมากแค่ไหน ตราบใดที่ชิ้นส่วนที่กำลังทำงานหยุดทำงาน ตัวเครื่องทั้งหมดก็สามารถเบรกได้ มอเตอร์สเต็ปเปอร์แบบเฟืองตัวหนอนจึงมีประสิทธิภาพการล็อกตัวเองนี้ มอเตอร์สเต็ปเปอร์แบบเฟืองตัวหนอนไม่มีประสิทธิภาพการล็อกตัวเอง แต่มอเตอร์ทดรอบแบบเฟืองตัวหนอนที่มีอัตราทดรอบ 1:30 ขึ้นไปมีประสิทธิภาพการล็อกตัวเองที่เชื่อถือได้ ยิ่งอัตราทดรอบสูงเท่าไหร่ ประสิทธิภาพการล็อกตัวเองก็จะยิ่งดีขึ้นเท่านั้น
จะเลือกอัตราส่วนการลดเพื่อให้แน่ใจถึงประสิทธิภาพการล็อกอัตโนมัติของมอเตอร์สเต็ปเปอร์แบบเฟืองตัวหนอนได้อย่างไร
1、ค่าสัมประสิทธิ์แรงเสียดทานของเฟืองตัวหนอนคือ 0.6 มุมนำทางของเฟืองตัวหนอนน้อยกว่า 3°29′11″ ซึ่งเป็นการล็อคอัตโนมัติ และในทางกลับกัน
2、ค่าสัมประสิทธิ์แรงเสียดทานของเฟืองตัวหนอนคือ 0.7 มุมนำทางของเฟืองตัวหนอนน้อยกว่า 4°03′57″ ซึ่งเป็นการล็อคอัตโนมัติ และในทางกลับกัน
3、เมื่อค่าสัมประสิทธิ์แรงเสียดทานของล้อหนอนอยู่ที่ 0.8 มุมนำของล้อหนอนจะน้อยกว่า 4°38′39″ นั่นคือ การล็อคตัวเอง และในทางกลับกัน
เมื่อมุมนำของเฟืองตัวหนอนน้อยกว่ามุมเสียดทานระหว่างฟันเฟืองของเฟืองตัวหนอน กลไกของมอเตอร์สเต็ปเปอร์แบบลดรอบจะล็อกตัวเอง ซึ่งสามารถล็อกตัวเองแบบย้อนกลับได้ กล่าวคือ มีเพียงเฟืองตัวหนอนเท่านั้นที่สามารถขับเคลื่อนเฟืองตัวหนอนได้ แต่ไม่สามารถขับเคลื่อนตัวหนอนได้ โดยทั่วไปในการออกแบบเครื่องจักรกลหนัก นักออกแบบมักจะใช้กลไกเฟืองตัวหนอนแบบล็อกตัวเอง เพราะการล็อกตัวเองแบบย้อนกลับมีบทบาทสำคัญอย่างยิ่งในการป้องกันความปลอดภัย
สูตรคำนวณค่าเฟืองตัวหนอนและเฟืองตัวหนอน
1. อัตราทดเกียร์ = จำนวนฟันเฟืองตัวหนอน ÷ จำนวนหัวตัวหนอน
2、ระยะห่างจากจุดศูนย์กลาง = (ระยะพิทช์ของล้อหนอน + ระยะพิทช์ของเฟืองหนอน) ÷ 2
3、เส้นผ่านศูนย์กลางของล้อหนอน = (จำนวนฟัน + 2) × โมดูลัส
4、ระยะพิทช์ของล้อหนอน = โมดูล × จำนวนฟัน
5、ระยะพิทช์ของหนอน = เส้นผ่านศูนย์กลางภายนอกของหนอน - 2×โมดูล
6、ตัวนำหนอน = π×โมดูล×หัว
7、มุมเกลียว (มุมนำทาง) tgB=(โมดูลัส×จำนวนหัว)÷ระยะพิทช์ของหนอน
8、สายหนอน=π×โมดูล×หัว
9、โมดูลัส = เส้นผ่านศูนย์กลางของวงกลมดัชนี/จำนวนฟัน
จำนวนหัวของหนอน : หนอนหัวเดียว (หนอนมีเกลียวเพียงเกลียวเดียว กล่าวคือ หนอนหมุนเป็นเวลา 1 สัปดาห์ และวงล้อหนอนหมุนผ่านฟัน 1 ซี่); หนอนสองหัว (หนอนมีเกลียวสองเกลียว กล่าวคือ หนอนหมุนเป็นเวลา 1 สัปดาห์ และวงล้อหนอนหมุนผ่านฟัน 2 ซี่)
โมดูลัสคือขนาดของเกลียวบนสกรู กล่าวคือ ยิ่งโมดูลัสมีขนาดใหญ่ เกลียวบนสกรูก็จะมีขนาดใหญ่ตามไปด้วย
ปัจจัยเส้นผ่านศูนย์กลางคือความหนาของสกรู
โมดูลัส: วงกลมดัชนีของเฟืองเป็นเกณฑ์มาตรฐานสำหรับการออกแบบและคำนวณขนาดของชิ้นส่วนแต่ละชิ้นของเฟือง และเส้นรอบวงของวงกลมดัชนีเฟือง = πd = zp ดังนั้นเส้นผ่านศูนย์กลางของวงกลมดัชนี
d=zp/π
เนื่องจาก π เป็นจำนวนอตรรกยะในสมการข้างต้น จึงไม่สะดวกในการวางวงกลมดัชนีเป็นข้อมูลอ้างอิง เพื่ออำนวยความสะดวกในการคำนวณ การผลิต และการตรวจสอบ อัตราส่วน p/π จึงถูกกำหนดขึ้นอย่างง่าย ๆ เรียกว่า โมดูลัส (modulus) ซึ่งแสดงเป็น m
ประเภทของเฟืองตัวหนอน
หนอนสามารถแบ่งออกได้เป็นไดรฟ์หนอนทรงกระบอก ไดรฟ์หนอนวงแหวน และไดรฟ์หนอนกรวยตามรูปทรงต่างๆ ไดรฟ์หนอนทรงกระบอกเป็นไดรฟ์หนอนที่นิยมใช้มากที่สุด
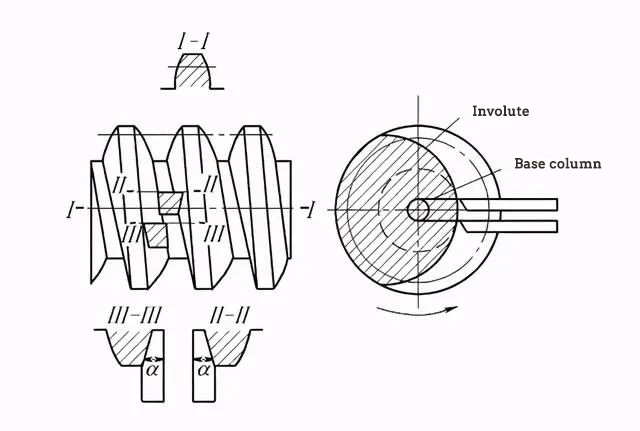
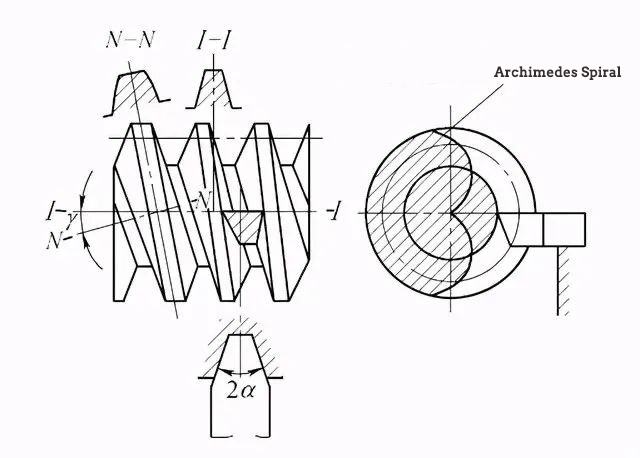
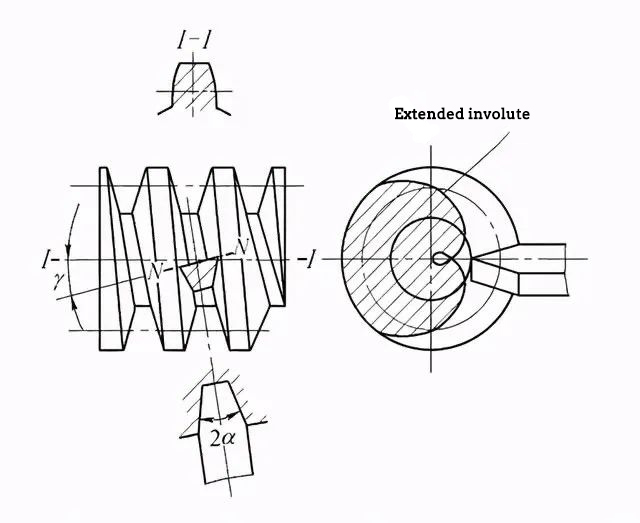
เฟืองตัวหนอนทรงกระบอกทั่วไปส่วนใหญ่จะถูกกลึงด้วยเครื่องกลึงที่มีใบมีดตรง ด้วยการเปลี่ยนแปลงตำแหน่งการติดตั้งเครื่องมือและเครื่องมือที่ใช้ ทำให้สามารถผลิตเฟืองตัวหนอนได้ 4 ประเภทที่มีฟันเฟืองต่างกันบนหน้าตัดของแกนตั้ง ได้แก่ เฟืองตัวหนอนแบบอินโวลูท (แบบ ZI), เฟืองตัวหนอนแบบอาร์คิมิดีส (แบบ ZA), เฟืองตัวหนอนแบบโปรไฟล์ตรงปกติ (ZN) และเฟืองตัวหนอนทรงกระบอกหุ้มเรียว (ZK)
หนอนอินโวลูท (ชนิด ZI)- ระนาบใบมีดสัมผัสกับฐานกระบอกสูบแบบหนอน และฟันปลายเป็นแบบเอวโค้ง เหมาะสำหรับความเร็วที่สูงขึ้นและกำลังที่มากขึ้น
พยาธิอาร์คิมิดีส (ชนิด ZA)- โปรไฟล์ฟันที่ตั้งฉากกับระนาบแกนคือสกรูอาร์คิมีดีส และโปรไฟล์ฟันในระนาบที่ผ่านแกนจะเป็นเส้นตรง การประมวลผลเรียบง่ายและมีความแม่นยำต่ำ (เฟืองตัวหนอนโปรไฟล์ตรงตามแนวแกน)
หนอนโปรไฟล์ตรงปกติ (ZN)- สามารถใช้ในการเจียรฟันด้วยล้อเจียรที่ปรับเปลี่ยนได้ การประมวลผลเป็นเรื่องง่าย มักใช้กับหนอนหลายหัว ประสิทธิภาพในการส่งผ่านสูงถึง 0.9
เห็นว่าคุณมีความเข้าใจคร่าวๆ เกี่ยวกับการส่งสัญญาณหลักการของมอเตอร์เฟืองตัวหนอนหากมีสิ่งใดที่คุณต้องการสื่อสารเพิ่มเติม โปรดติดต่อเรา!
เราทำงานร่วมกับลูกค้าอย่างใกล้ชิด รับฟังความต้องการและดำเนินการตามคำขอของลูกค้า เราเชื่อว่าพื้นฐานของความร่วมมือที่ทุกฝ่ายได้ประโยชน์คือคุณภาพของผลิตภัณฑ์และการบริการลูกค้า
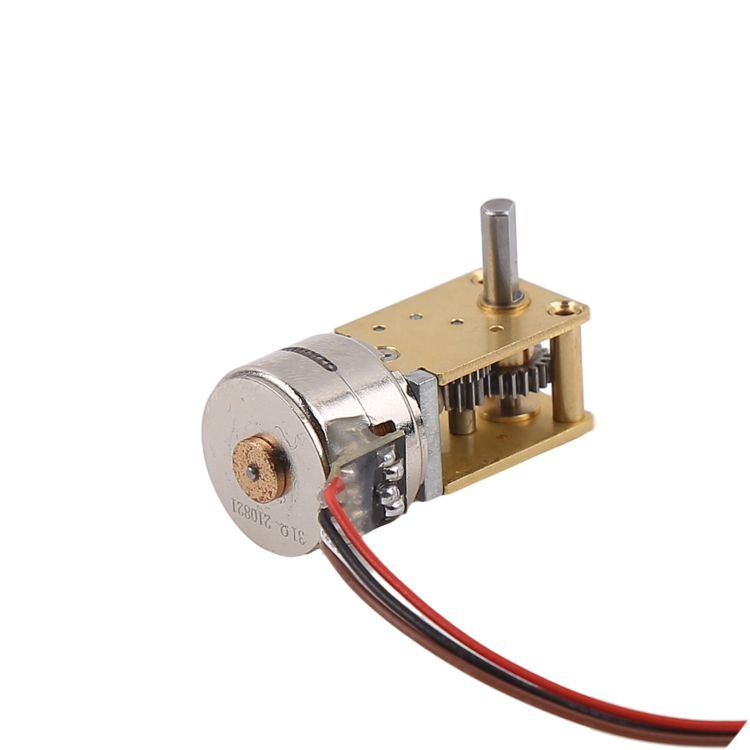
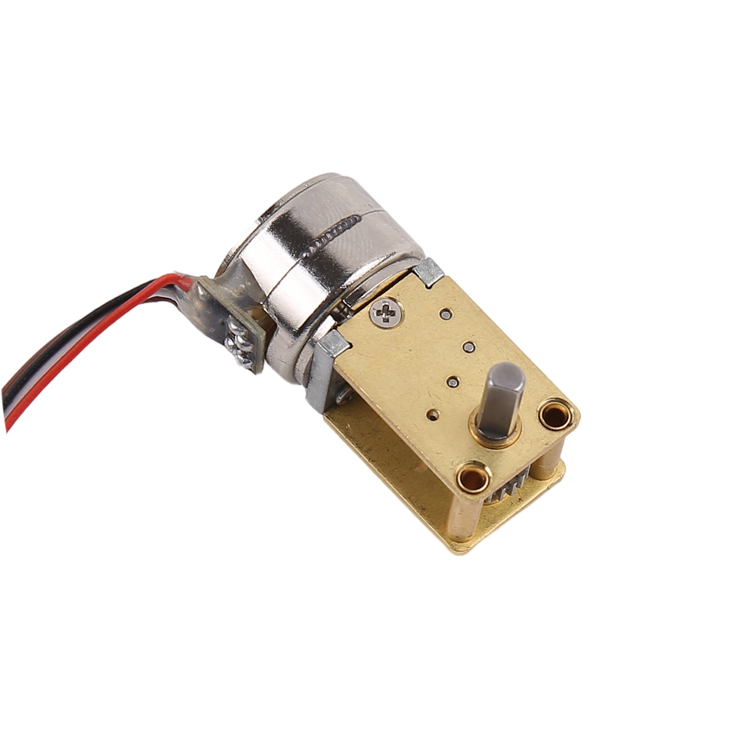
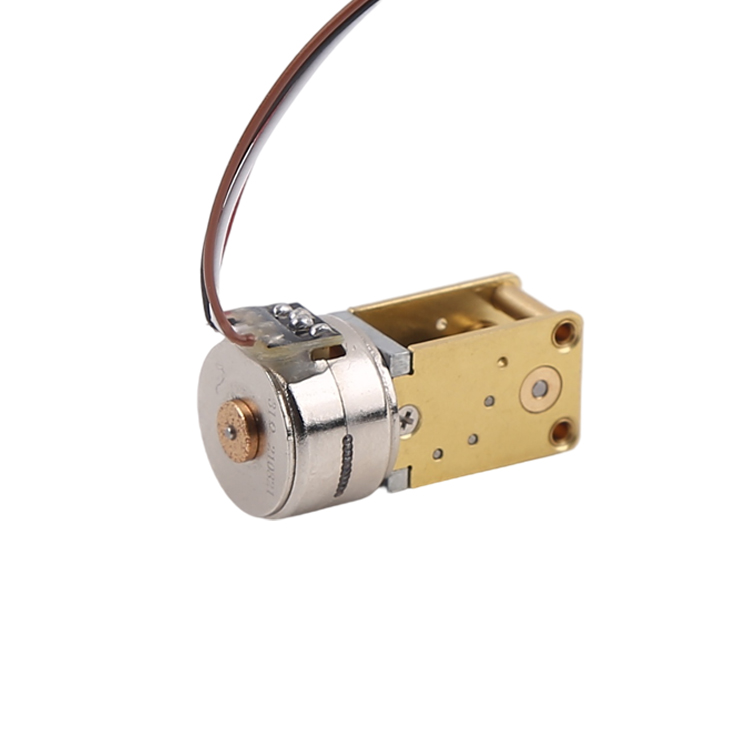
บริษัท ฉางโจว วิค-เทค มอเตอร์ เทคโนโลยี จำกัด เป็นองค์กรวิจัยและพัฒนาระดับมืออาชีพที่มุ่งเน้นการวิจัยและพัฒนามอเตอร์ โซลูชันครบวงจรสำหรับการใช้งานมอเตอร์ รวมถึงการแปรรูปและผลิตผลิตภัณฑ์มอเตอร์ บริษัท ฉางโจว วิค-เทค มอเตอร์ เทคโนโลยี จำกัด มีความเชี่ยวชาญด้านการผลิตมอเตอร์ขนาดเล็กและอุปกรณ์เสริมตั้งแต่ปี พ.ศ. 2554 ผลิตภัณฑ์หลักของเรา ได้แก่ มอเตอร์สเต็ปเปอร์ขนาดเล็ก มอเตอร์เกียร์ มอเตอร์เกียร์ เครื่องขับดันใต้น้ำ และไดรเวอร์และตัวควบคุมมอเตอร์

ทีมงานของเรามีประสบการณ์มากกว่า 20 ปีในการออกแบบ พัฒนา และผลิตไมโครมอเตอร์ และสามารถพัฒนาผลิตภัณฑ์และช่วยเหลือลูกค้าในการออกแบบตามความต้องการพิเศษ! ปัจจุบัน เราจำหน่ายสินค้าให้กับลูกค้าในหลายร้อยประเทศในเอเชีย อเมริกาเหนือ และยุโรป เช่น สหรัฐอเมริกา สหราชอาณาจักร เกาหลี เยอรมนี แคนาดา สเปน และอื่นๆ ปรัชญาการดำเนินธุรกิจของเรา "ความซื่อสัตย์ ความน่าเชื่อถือ มุ่งเน้นคุณภาพ" และบรรทัดฐานคุณค่า "ลูกค้ามาก่อน" มุ่งเน้นนวัตกรรมที่มุ่งเน้นประสิทธิภาพ ความร่วมมือ และจิตวิญญาณแห่งองค์กรที่มีประสิทธิภาพ เพื่อสร้าง "การสร้างและแบ่งปัน" เป้าหมายสูงสุดคือการสร้างมูลค่าสูงสุดให้กับลูกค้าของเรา
เวลาโพสต์: 30 ม.ค. 2566