เนื่องจากสุขภาพและความปลอดภัยของประชาชนเป็นสิ่งสำคัญสูงสุดในชีวิตประจำวันของเรา ระบบล็อคประตูอัตโนมัติจึงได้รับความนิยมมากขึ้นเรื่อยๆ และล็อคเหล่านี้จำเป็นต้องมีการควบคุมการเคลื่อนไหวที่ซับซ้อน ความแม่นยำสูงในขนาดเล็กมอเตอร์สเต็ปเปอร์เป็นโซลูชันที่เหมาะสมที่สุดสำหรับดีไซน์ที่กะทัดรัดและทันสมัยนี้ แบบอัตโนมัติกุญแจประตูระบบบ้านอัตโนมัติมีมานานแล้ว โดยเริ่มแรกในพื้นที่เชิงพาณิชย์ เช่น โรงแรมและสำนักงาน ด้วยจำนวนผู้ใช้สมาร์ทโฟนที่เพิ่มขึ้นและการแพร่หลายของเทคโนโลยีบ้านอัจฉริยะ ทำให้ระบบบ้านอัตโนมัติในที่พักอาศัยเริ่มแพร่หลายมากขึ้นการใช้งานระบบล็อคประตูนอกจากนี้ยังได้รับความนิยมมากขึ้นด้วย อย่างไรก็ตาม มีความแตกต่างทางเทคนิคระหว่างผู้ใช้เชิงพาณิชย์และผู้ใช้ตามบ้าน เช่น การใช้แบตเตอรี่เทียบกับการเชื่อมต่อแบบอิเล็กทรอนิกส์ และเทคโนโลยี RFID เทียบกับเทคโนโลยีบลูทูธ

กลอนประตูแบบดั้งเดิมต้องใช้กุญแจเสียบเข้าไปในกระบอกล็อคเพื่อล็อค/ปลดล็อคโดยการหมุนด้วยมือ ข้อดีของวิธีนี้คือค่อนข้างปลอดภัย แต่คนอาจทำกุญแจหายหรือวางผิดที่ และกระบวนการเปลี่ยนล็อค/กุญแจต้องใช้เครื่องมือและความเชี่ยวชาญ ล็อคอิเล็กทรอนิกส์มีความยืดหยุ่นมากกว่าในแง่ของการควบคุมการเข้าถึง และมักสามารถแก้ไขและอัปเดตได้ง่ายผ่านซอฟต์แวร์ ล็อคอิเล็กทรอนิกส์หลายรุ่นมีทั้งตัวเลือกการควบคุมแบบแมนนวลและแบบอิเล็กทรอนิกส์ ทำให้เป็นโซลูชันที่แข็งแกร่งกว่า
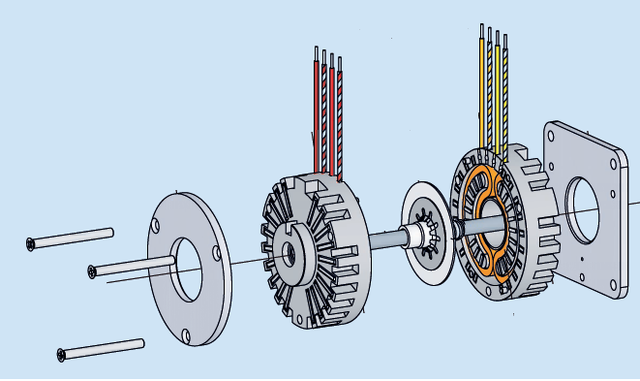
มอเตอร์สเต็ปเปอร์ขนาดเล็กเหมาะสำหรับล็อคอิเล็กทรอนิกส์ขนาดกะทัดรัด ตอบโจทย์ความต้องการด้านขนาดที่จำกัดและการกำหนดตำแหน่งที่แม่นยำ วิศวกรรมมอเตอร์และเทคโนโลยีการสร้างสนามแม่เหล็กที่เป็นกรรมสิทธิ์ได้ผลักดันการพัฒนาของมอเตอร์สเต็ปเปอร์ที่มีเส้นผ่านศูนย์กลางเล็กที่สุดในปัจจุบัน (3.4 มม. OD) มีการใช้เทคนิคการวิเคราะห์แม่เหล็กและโครงสร้างขั้นสูงเพื่อเพิ่มประสิทธิภาพการออกแบบและวัสดุให้เหมาะสมกับพื้นที่จำกัด หนึ่งในปัจจัยสำคัญที่สุดสำหรับมอเตอร์สเต็ปเปอร์ขนาดเล็กคือความยาวขั้นของมอเตอร์ ซึ่งขึ้นอยู่กับความละเอียดที่ต้องการ ความยาวขั้นที่พบได้บ่อยที่สุดคือ 7.5 องศาและ 3.6 องศา ซึ่งสอดคล้องกับ 48 และ 100 ขั้นต่อรอบ ตามลำดับ โดยมอเตอร์สเต็ปเปอร์จะมีมุมขั้น 18 องศา เมื่อขับเคลื่อนแบบเต็มขั้น (การกระตุ้นแบบ 2-2 เฟส) มอเตอร์จะหมุน 20 ขั้นต่อรอบ และระยะห่างของเกลียวทั่วไปคือ 0.4 มม. ดังนั้นจึงสามารถควบคุมตำแหน่งได้อย่างแม่นยำถึง 0.02 มม.

มอเตอร์สเต็ปเปอร์สามารถมีตัวลดเกียร์ ซึ่งช่วยให้มุมการหมุนแต่ละขั้นแคบลง และมีเกียร์ทดรอบที่ช่วยเพิ่มแรงบิดได้ สำหรับการเคลื่อนที่เชิงเส้น มอเตอร์สเต็ปเปอร์จะเชื่อมต่อกับสกรูผ่านน็อต (มอเตอร์เหล่านี้เรียกอีกอย่างว่าแอคทูเอเตอร์เชิงเส้น) หากตัวล็อคอิเล็กทรอนิกส์ใช้ตัวลดเกียร์ สกรูจะสามารถเคลื่อนที่ได้อย่างแม่นยำแม้จะมีทางลาดชันมาก
ส่วนอินพุตของแหล่งจ่ายไฟมอเตอร์สเต็ปเปอร์สามารถมีได้หลายรูปแบบ เช่น ขั้วต่อ FPC ขั้วต่อสามารถเชื่อมติดกับ PCB ได้โดยตรง ส่วนก้านดันของส่วนเอาต์พุตอาจเป็นตัวเลื่อนพลาสติกหรือตัวเลื่อนโลหะ และตัวเลื่อนแบบกำหนดเองได้ในช่วงระยะการเคลื่อนที่ที่ต้องการของตัวล็อค เนื่องจากมอเตอร์สเต็ปเปอร์มีขนาดเล็กและสกรูบาง ความยาวของเกลียวที่ประมวลผลจึงมีจำกัด และระยะการเคลื่อนที่สูงสุดของตัวล็อคโดยทั่วไปจะน้อยกว่า 50 มม. โดยปกติแล้ว มอเตอร์สเต็ปเปอร์จะมีแรงผลักประมาณ 150 ถึง 300 กรัม แรงผลักจะแตกต่างกันไปขึ้นอยู่กับแรงดันไฟฟ้าที่ขับเคลื่อน ความต้านทานของมอเตอร์ ฯลฯ
บทสรุป
ด้วยความสนใจของผู้บริโภคในผลิตภัณฑ์ที่มีกำไรต่ำและไม่โดดเด่น มอเตอร์สเต็ปเปอร์ขนาดเล็กจึงตอบโจทย์ความต้องการด้านขนาดที่เล็กลงนี้ได้ นอกจากขนาดที่กะทัดรัดแล้ว มอเตอร์สเต็ปเปอร์ยังควบคุมได้ง่ายกว่า โดยเฉพาะอย่างยิ่งสำหรับการกำหนดตำแหน่งที่แม่นยำและแรงบิดที่ความเร็วต่ำ เช่น การล็อคอัตโนมัติ เพื่อให้ได้ฟังก์ชันการทำงานเดียวกัน เทคโนโลยีมอเตอร์อื่นๆ จำเป็นต้องเพิ่มเซ็นเซอร์ Hall-effect หรือกลไกควบคุมการป้อนกลับตำแหน่งที่ซับซ้อน มอเตอร์สเต็ปเปอร์สามารถขับเคลื่อนได้ด้วยไมโครคอนโทรลเลอร์แบบง่ายๆ ซึ่งช่วยลดความกังวลของวิศวกรออกแบบเกี่ยวกับโซลูชันที่ซับซ้อนเกินไปได้
วันที่โพสต์: 25 พฤศจิกายน 2022