เนื่องจากสุขภาพและความปลอดภัยของประชาชนเป็นสิ่งสำคัญที่สุดในชีวิตประจำวันของเรา ระบบล็อคประตูอัตโนมัติจึงได้รับความนิยมเพิ่มมากขึ้น และล็อคเหล่านี้จำเป็นต้องมีการควบคุมการเคลื่อนไหวที่ซับซ้อน ความแม่นยำระดับจิ๋วมอเตอร์สเต็ปเปอร์เป็นโซลูชันที่เหมาะสำหรับการออกแบบที่กะทัดรัดและซับซ้อนนี้ อัตโนมัติล็อคประตูมีมาระยะหนึ่งแล้ว โดยเริ่มต้นในพื้นที่เชิงพาณิชย์ของโรงแรมและสำนักงาน ด้วยจำนวนผู้ใช้สมาร์ทโฟนที่เพิ่มขึ้นและการแพร่กระจายของเทคโนโลยีบ้านอัจฉริยะ ระบบอัตโนมัติสำหรับที่อยู่อาศัยการใช้งานล็อคประตูก็ได้รับความนิยมเช่นกัน มีความแตกต่างทางเทคนิคระหว่างผู้ใช้เชิงพาณิชย์และผู้ใช้ตามบ้านเรือน เช่น การใช้แบตเตอรี่เทียบกับการเชื่อมต่ออิเล็กทรอนิกส์ และการใช้ RFID เทียบกับเทคโนโลยีบลูทูธ

กลอนแบบดั้งเดิมต้องเสียบกุญแจเข้าไปในกระบอกกุญแจเพื่อล็อค/ปลดล็อคโดยการหมุนด้วยมือ ข้อดีของวิธีนี้คือค่อนข้างปลอดภัย คนเรามักทำกุญแจหายหรือวางผิดที่ และการเปลี่ยนกุญแจจำเป็นต้องใช้เครื่องมือและความเชี่ยวชาญ กลอนอิเล็กทรอนิกส์มีความยืดหยุ่นมากกว่าในแง่ของการควบคุมการเข้าถึง และมักจะสามารถปรับเปลี่ยนและอัปเดตได้ง่ายผ่านซอฟต์แวร์ กลอนอิเล็กทรอนิกส์หลายรุ่นมีตัวเลือกการควบคุมทั้งแบบแมนนวลและแบบอิเล็กทรอนิกส์ จึงเป็นโซลูชันที่มีประสิทธิภาพมากกว่า
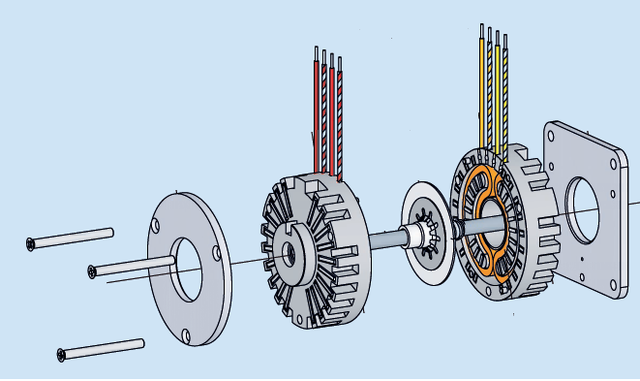
มอเตอร์สเต็ปเปอร์ขนาดเส้นผ่านศูนย์กลางเล็กสำหรับล็อคอิเล็กทรอนิกส์ขนาดกะทัดรัดเหมาะอย่างยิ่งสำหรับโซลูชันที่มีข้อจำกัดด้านขนาดและตำแหน่งที่แม่นยำ วิศวกรรมมอเตอร์และเทคโนโลยีการทำให้เป็นแม่เหล็กที่เป็นกรรมสิทธิ์ได้ผลักดันการพัฒนามอเตอร์สเต็ปเปอร์ที่มีเส้นผ่านศูนย์กลางเล็กที่สุดที่มีอยู่ในปัจจุบัน (เส้นผ่านศูนย์กลางภายนอก 3.4 มม.) เทคนิคการวิเคราะห์แม่เหล็กและโครงสร้างขั้นสูงถูกนำมาใช้เพื่อปรับการออกแบบและวัสดุให้เหมาะสมที่สุดสำหรับพื้นที่จำกัด หนึ่งในการตัดสินใจที่สำคัญที่สุดสำหรับมอเตอร์สเต็ปเปอร์ขนาดเล็กคือความยาวสเต็ปเปอร์ของมอเตอร์ ซึ่งขึ้นอยู่กับความละเอียดเฉพาะ ความยาวสเต็ปเปอร์ที่พบบ่อยที่สุดคือ 7.5 องศาและ 3.6 องศา ซึ่งสอดคล้องกับ 48 และ 100 สเต็ปต่อการหมุน ตามลำดับ โดยมอเตอร์สเต็ปเปอร์มีมุมสเต็ปเปอร์ 18 องศา ด้วยไดรฟ์แบบสเต็ปเต็ม (การกระตุ้นแบบ 2-2 เฟส) มอเตอร์จะหมุน 20 สเต็ปต่อการหมุน และระยะพิทช์ร่วมของสกรูคือ 0.4 มม. ทำให้สามารถควบคุมตำแหน่งได้อย่างแม่นยำถึง 0.02 มม.

มอเตอร์สเต็ปเปอร์อาจมีตัวลดเกียร์ซึ่งให้มุมสเต็ปที่เล็กกว่า และตัวลดเกียร์ซึ่งเพิ่มแรงบิดที่มีอยู่ สำหรับการเคลื่อนที่เชิงเส้น มอเตอร์สเต็ปเปอร์จะเชื่อมต่อกับสกรูผ่านน็อต (มอเตอร์เหล่านี้เรียกอีกอย่างว่าตัวกระตุ้นเชิงเส้น) หากระบบล็อกอิเล็กทรอนิกส์ใช้ตัวลดเกียร์ สกรูจะสามารถเคลื่อนที่ได้อย่างแม่นยำแม้ในพื้นที่ลาดชันมาก
ส่วนอินพุตของแหล่งจ่ายไฟของสเต็ปเปอร์มอเตอร์สามารถมีรูปแบบได้หลากหลาย เช่น ขั้วต่อ FPC ขั้วต่อสามารถเชื่อมเข้ากับแผงวงจรพิมพ์ได้โดยตรง แกนผลักของส่วนเอาต์พุตอาจเป็นสไลเดอร์พลาสติกหรือสไลเดอร์โลหะ และสไลเดอร์แบบกำหนดเองได้หลากหลายตามความต้องการระยะการเคลื่อนที่ของตัวล็อก เนื่องจากสเต็ปเปอร์มอเตอร์มีขนาดเล็กและสกรูบาง ความยาวของเกลียวที่ประมวลผลจึงมีจำกัด และระยะการเคลื่อนที่สูงสุดของตัวล็อกโดยทั่วไปจะน้อยกว่า 50 มม. โดยทั่วไปแล้ว สเต็ปเปอร์มอเตอร์จะมีแรงขับประมาณ 150 ถึง 300 กรัม แรงขับจะแตกต่างกันไปขึ้นอยู่กับแรงดันไฟฟ้าของไดรฟ์ ความต้านทานของมอเตอร์ และอื่นๆ
บทสรุป
ด้วยความสนใจของผู้บริโภคในผลิตภัณฑ์ที่มีอัตรากำไรต่ำและไม่สร้างความรำคาญ มอเตอร์สเต็ปเปอร์ขนาดเล็กจึงสามารถรองรับขนาดที่เล็กลงนี้ได้ นอกจากรูปทรงที่กะทัดรัดแล้ว มอเตอร์สเต็ปเปอร์ยังควบคุมได้ง่ายขึ้น โดยเฉพาะอย่างยิ่งเมื่อต้องการตำแหน่งที่แม่นยำและแรงบิดความเร็วต่ำ เช่น ระบบล็อกอัตโนมัติ เพื่อให้ได้ฟังก์ชันการทำงานแบบเดียวกัน เทคโนโลยีมอเตอร์อื่นๆ จำเป็นต้องเพิ่มเซ็นเซอร์ Hall-effect หรือกลไกควบคุมตำแหน่งป้อนกลับที่ซับซ้อน มอเตอร์สเต็ปเปอร์สามารถขับเคลื่อนด้วยไมโครคอนโทรลเลอร์แบบง่าย ซึ่งช่วยลดความกังวลของวิศวกรออกแบบเกี่ยวกับโซลูชันที่ซับซ้อนเกินไป
เวลาโพสต์: 25 พ.ย. 2565