เทคโนโลยีแขนขาเทียมได้มีการพัฒนาอย่างน่าทึ่งในช่วงไม่กี่ปีที่ผ่านมา โดยเฉพาะอย่างยิ่งในด้านแขนขาเทียมแบบใช้มอเตอร์ หนึ่งในนวัตกรรมที่ขับเคลื่อนความก้าวหน้าเหล่านี้คือ มอเตอร์สเต็ปเปอร์แบบลดความเร็วขนาด 10 มม. ซึ่งให้การควบคุมที่แม่นยำและฟังก์ชันการทำงานที่ดียิ่งขึ้นสำหรับผู้ใช้ บทความนี้จะสำรวจบทบาทของมอเตอร์เหล่านี้ในแขนขาเทียมสมัยใหม่ ข้อดี ความท้าทายในการบูรณาการ และผลกระทบในอนาคต
ในด้านการผลิตแขนขาเทียม การบูรณาการเทคโนโลยีมอเตอร์ขั้นสูงได้ปฏิวัติความสามารถของแขนขาเทียมอย่างสิ้นเชิง หัวใจสำคัญของการพัฒนาครั้งนี้คือมอเตอร์สเต็ปเปอร์ โดยเฉพาะอย่างยิ่งมอเตอร์สเต็ปเปอร์แบบลดความเร็วขนาดกะทัดรัด 10 มม. ซึ่งให้ความแม่นยำและการควบคุมการเคลื่อนไหวที่เหนือกว่า การทำความเข้าใจการใช้งานและประโยชน์ของมอเตอร์เหล่านี้มีความสำคัญอย่างยิ่งต่อการเข้าใจผลกระทบที่มีต่อการออกแบบแขนขาเทียมและประสบการณ์ของผู้ใช้
ทำความเข้าใจเกี่ยวกับอวัยวะเทียมและระบบขับเคลื่อนด้วยมอเตอร์
แขนขาเทียมคืออวัยวะเทียมที่ใช้ทดแทนแขนขาที่ถูกตัดหรือขาดหายไป ออกแบบมาเพื่อฟื้นฟูการทำงานและการเคลื่อนไหวให้กับบุคคลนั้นๆ ในอดีต แขนขาเทียมอาศัยระบบกลไกในการเคลื่อนไหว ซึ่งจำกัดขอบเขตและความลื่นไหลของการเคลื่อนไหว แต่ด้วยการพัฒนาแขนขาเทียมแบบใช้มอเตอร์ เช่น มอเตอร์สเต็ปเปอร์แบบลดความเร็วขนาด 10 มม. ทำให้ผู้ใช้สามารถสัมผัสประสบการณ์การเคลื่อนไหวของแขนขาที่ดูเป็นธรรมชาติและปรับตัวได้ดียิ่งขึ้น
ความท้าทายในการออกแบบขาเทียม
การออกแบบแขนขาเทียมที่เลียนแบบความซับซ้อนของการเคลื่อนไหวตามธรรมชาติเป็นเรื่องที่ท้าทายหลายประการ การกระจายน้ำหนัก ความทนทาน และความสามารถในการเคลื่อนไหวที่แม่นยำเป็นสิ่งสำคัญที่ต้องพิจารณา มอเตอร์มีบทบาทสำคัญในการเอาชนะความท้าทายเหล่านี้โดยการให้พลังงานและการควบคุมที่จำเป็นสำหรับกิจกรรมต่างๆ
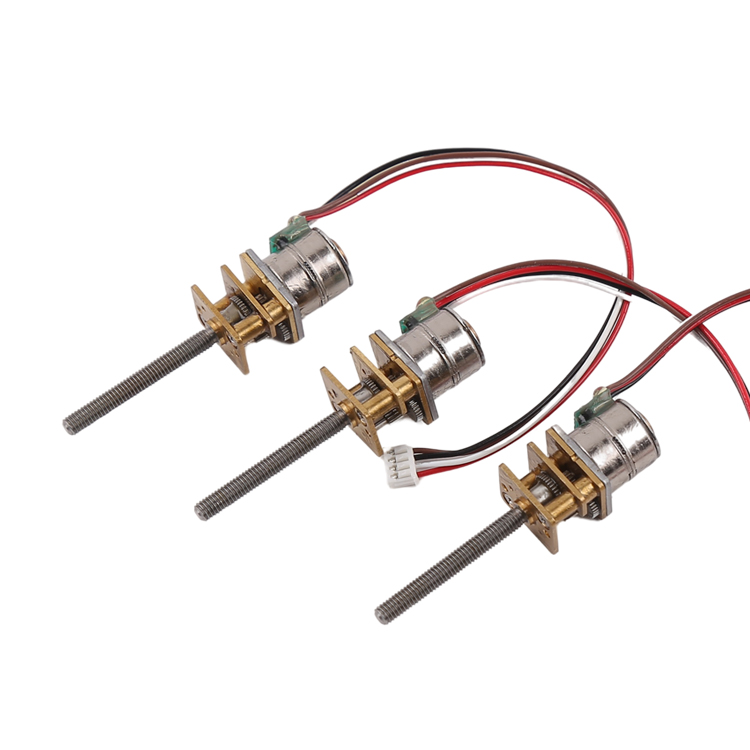
บทนำเกี่ยวกับมอเตอร์สเต็ปเปอร์ลดความเร็วขนาด 10 มม.
มอเตอร์สเต็ปเปอร์แบบลดความเร็วขนาด 10 มม. เป็นมอเตอร์สเต็ปเปอร์ชนิดพิเศษที่ขึ้นชื่อเรื่องขนาดกะทัดรัดและความสามารถในการควบคุมการเคลื่อนไหวที่แม่นยำ มอเตอร์เหล่านี้ทำงานโดยการแปลงพัลส์ไฟฟ้าเป็นการเคลื่อนไหวเชิงกลทีละน้อย ทำให้แขนขาเทียมสามารถเคลื่อนไหวได้อย่างแม่นยำ เช่น การจับวัตถุหรือการเดินอย่างมั่นคง
ข้อดีของการใช้มอเตอร์สเต็ปเปอร์ลดความเร็วขนาด 10 มม.
ข้อดีหลักประการหนึ่งของมอเตอร์สเต็ปเปอร์ลดความเร็วขนาด 10 มม. คือความสามารถในการให้แรงบิดสูงที่ความเร็วต่ำ ทำให้เหมาะสำหรับงานที่ต้องการการเคลื่อนไหวที่แม่นยำ ความสามารถนี้ช่วยให้การเปลี่ยนท่าทางการเคลื่อนไหวราบรื่นยิ่งขึ้น เพิ่มประสิทธิภาพโดยรวมและประสบการณ์การใช้งานของแขนขาเทียม
นวัตกรรมทางเทคโนโลยีและผลกระทบ
ความก้าวหน้าล่าสุดในเทคโนโลยีสเต็ปเปอร์มอเตอร์ได้ช่วยเพิ่มประสิทธิภาพและความน่าเชื่อถือของแขนขาเทียมแบบใช้มอเตอร์อย่างมีนัยสำคัญ นวัตกรรมต่างๆ เช่น ระบบป้อนกลับที่ได้รับการปรับปรุง และอัลกอริธึมควบคุมแบบบูรณาการ ทำให้แขนขาเทียมสามารถปรับตัวให้เข้ากับความตั้งใจและสภาพแวดล้อมของผู้ใช้ได้อย่างราบรื่นยิ่งขึ้น
กรณีศึกษาและการประยุกต์ใช้ในโลกแห่งความเป็นจริง
กรณีศึกษาจำนวนมากชี้ให้เห็นถึงความสำเร็จในการบูรณาการมอเตอร์สเต็ปเปอร์ลดความเร็วขนาด 10 มม. เข้ากับอุปกรณ์เทียม ผู้ใช้รายงานว่ามีความมั่นใจมากขึ้นในการทำภารกิจประจำวัน เช่น การเดินบนพื้นผิวที่ไม่เรียบ หรือการหยิบจับวัตถุด้วยความแม่นยำ มอเตอร์เหล่านี้พิสูจน์แล้วว่ามีบทบาทสำคัญในการปรับปรุงคุณภาพชีวิตของผู้ที่สูญเสียแขนขา
ความท้าทายและข้อควรพิจารณาในการบูรณาการ
แม้จะมีข้อดีหลายประการ แต่การนำมอเตอร์สเต็ปเปอร์ลดความเร็วขนาด 10 มม. มาใช้ในการออกแบบขาเทียมก็มีข้อท้าทายหลายอย่าง ความเข้ากันได้กับระบบขาเทียมที่มีอยู่ การจัดการพลังงาน และการรับประกันความทนทานภายใต้สภาวะต่างๆ เป็นปัจจัยสำคัญที่วิศวกรและนักออกแบบต้องคำนึงถึงในระหว่างขั้นตอนการพัฒนา
การเปรียบเทียบกับมอเตอร์ประเภทอื่นๆ

เมื่อเปรียบเทียบกับมอเตอร์กระแสตรงแบบดั้งเดิมหรือระบบไฮดรอลิก มอเตอร์สเต็ปเปอร์มีข้อดีที่โดดเด่นในด้านความแม่นยำในการควบคุมและประสิทธิภาพการใช้พลังงาน ความสามารถในการเคลื่อนที่ทีละน้อยของมอเตอร์สเต็ปเปอร์ช่วยลดความจำเป็นในการใช้กลไกเชื่อมต่อที่ซับซ้อน จึงทำให้การออกแบบและการบำรุงรักษาขาเทียมง่ายขึ้น
แนวโน้มในอนาคตและการประยุกต์ใช้ที่มีศักยภาพ
เมื่อมองไปข้างหน้า อนาคตของมอเตอร์สเต็ปเปอร์ลดความเร็วขนาด 10 มม. ในแขนขาเทียมดูสดใส การวิจัยอย่างต่อเนื่องในด้านวัสดุศาสตร์ อัลกอริทึมควบคุมขั้นสูง และการบูรณาการปัญญาประดิษฐ์ คาดว่าจะช่วยเพิ่มขีดความสามารถของแขนขาเทียมแบบใช้มอเตอร์ได้มากยิ่งขึ้น ความก้าวหน้าเหล่านี้อาจกำหนดมาตรฐานการดูแลผู้ที่สูญเสียแขนขาขึ้นใหม่ได้
ความปลอดภัย ความน่าเชื่อถือ และข้อพิจารณาด้านจริยธรรม
การรับรองความปลอดภัยและความน่าเชื่อถือของแขนขาเทียมแบบใช้มอเตอร์ยังคงมีความสำคัญสูงสุด โปรโตคอลการทดสอบที่เข้มงวดและการปฏิบัติตามมาตรฐานข้อบังคับเป็นสิ่งจำเป็นเพื่อลดความเสี่ยงที่เกี่ยวข้องกับความล้มเหลวทางกลไกหรือการใช้งานที่ไม่เหมาะสม นอกจากนี้ การพิจารณาด้านจริยธรรมเกี่ยวกับความสามารถในการเข้าถึง ความสามารถในการจ่าย และผลกระทบทางจริยธรรมของการเพิ่มขีดความสามารถของมนุษย์ผ่านเทคโนโลยีจะต้องได้รับการพิจารณาอย่างรอบคอบประเมิน.
Hมีอนาคตที่สดใส
โดยสรุปแล้ว มอเตอร์สเต็ปเปอร์แบบลดความเร็วขนาด 10 มม. ถือเป็นความก้าวหน้าอย่างมากในเทคโนโลยีขาเทียม ซึ่งให้การควบคุมที่แม่นยำและฟังก์ชันการทำงานที่ดียิ่งขึ้นสำหรับผู้ใช้ เนื่องจากการวิจัยและพัฒนาอย่างต่อเนื่องผลักดันนวัตกรรมในสาขานี้ ศักยภาพในการปรับปรุงคุณภาพชีวิตของผู้ที่สูญเสียแขนขาจึงขยายตัวอย่างต่อเนื่อง ด้วยการแก้ไขปัญหาด้านการบูรณาการ การยอมรับความก้าวหน้าทางเทคโนโลยี และการให้ความสำคัญกับข้อเสนอแนะของผู้ใช้ อนาคตของขาเทียมแบบใช้มอเตอร์จึงมีแนวโน้มที่ดีในการสร้างสรรค์โซลูชันที่ดูเป็นธรรมชาติ ใช้งานง่าย และเสริมสร้างศักยภาพมากยิ่งขึ้น
วันที่เผยแพร่: 2 สิงหาคม 2567