ในการออกแบบอุปกรณ์ที่ใช้มอเตอร์ จำเป็นต้องเลือกมอเตอร์ที่เหมาะสมที่สุดสำหรับงานที่ต้องการ บทความนี้จะเปรียบเทียบคุณลักษณะ ประสิทธิภาพ และคุณสมบัติของมอเตอร์แบบแปรงถ่านมอเตอร์สเต็ปเปอร์และมอเตอร์ไร้แปรงถ่าน หวังว่าจะเป็นข้อมูลอ้างอิงสำหรับทุกคนในการเลือกมอเตอร์ อย่างไรก็ตาม เนื่องจากมีสเปคมากมายในประเภทมอเตอร์เดียวกัน โปรดใช้ข้อมูลเหล่านี้เป็นเพียงข้อมูลอ้างอิงเท่านั้น สุดท้ายนี้ จำเป็นต้องตรวจสอบข้อมูลโดยละเอียดผ่านข้อกำหนดทางเทคนิคของมอเตอร์แต่ละตัว
คุณสมบัติของมอเตอร์ขนาดเล็ก: ตารางต่อไปนี้สรุปคุณสมบัติของมอเตอร์สเต็ปปิ้ง มอเตอร์แบบมีแปรงถ่าน และมอเตอร์แบบไม่มีแปรงถ่าน
| มอเตอร์สเต็ปเปอร์ | มอเตอร์แบบแปรงถ่าน | มอเตอร์ไร้แปรงถ่าน | |
| วิธีการหมุน | วงจรขับใช้เพื่อกำหนดลำดับของแต่ละเฟส (รวมถึงสองเฟส สามเฟส และห้าเฟส) ของขดลวดอาร์มาเจอร์ | กระแสไฟฟ้าในขดลวดอาร์มาเจอร์จะถูกสลับผ่านกลไกการเรียงกระแสแบบสัมผัสเลื่อนของแปรงถ่านและคอมมิวเทเตอร์ | เทคโนโลยีไร้แปรงถ่านเกิดขึ้นได้จากการแทนที่แปรงถ่านและคอมมิวเทเตอร์ด้วยเซ็นเซอร์ตำแหน่งขั้วแม่เหล็กและสวิตช์เซมิคอนดักเตอร์ |
| วงจรขับ | ความต้องการ | ไม่พึงประสงค์ | ความต้องการ |
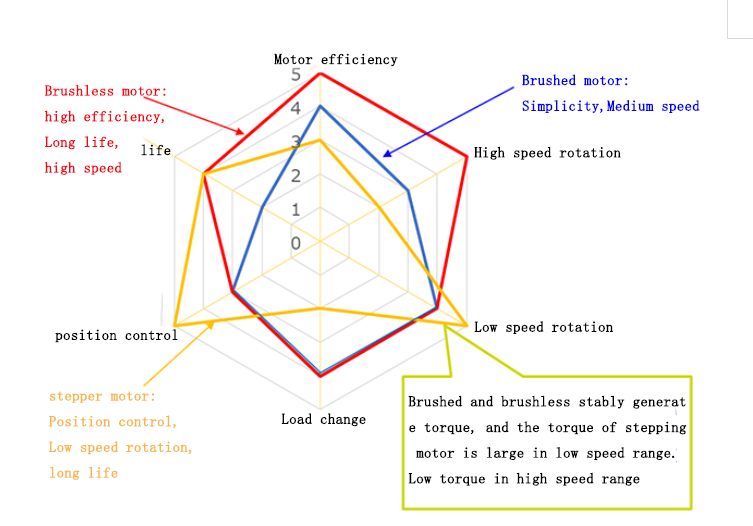
| แรงบิด | แรงบิดค่อนข้างมาก (โดยเฉพาะแรงบิดที่ความเร็วต่ำ) | แรงบิดเริ่มต้นมีค่ามาก และแรงบิดจะแปรผันตรงกับกระแสไฟฟ้าในขดลวดอาร์มาเจอร์ (แรงบิดจะมีค่าค่อนข้างมากที่ความเร็วปานกลางถึงสูง) | |
| ความเร็วรอบ | แรงบิดค่อนข้างมาก (โดยเฉพาะแรงบิดที่ความเร็วต่ำ) | ความเร็วแปรผันตรงกับแรงดันไฟฟ้าที่จ่ายให้กับขดลวดอาร์มาเจอร์ ความเร็วจะลดลงเมื่อแรงบิดโหลดเพิ่มขึ้น | |
| การหมุนด้วยความเร็วสูง | มันแปรผันตรงกับความถี่ของพัลส์อินพุต บริเวณที่ไม่ตรงจังหวะอยู่ในช่วงความเร็วต่ำ การหมุนด้วยความเร็วสูงทำได้ยาก (ต้องลดความเร็วลง) | เนื่องจากข้อจำกัดของกลไกการเรียงกระแสด้วยแปรงและคอมมิวเทเตอร์ ความเร็วสูงสุดจึงสามารถสูงถึงหลายพันรอบต่อนาที | รอบต่อนาที สูงถึงหลายพันถึงหลายหมื่นรอบต่อนาที |
| ชีวิตที่หมุนเวียน | มันถูกกำหนดโดยอายุการใช้งาน หลายหมื่นชั่วโมง | จำกัดด้วยการสึกหรอของแปรงถ่านและคอมมิวเทเตอร์ ใช้งานได้นานหลายร้อยถึงหลายพันชั่วโมง | มันถูกกำหนดโดยอายุการใช้งาน หลายหมื่นถึงหลายแสนชั่วโมง |
| วิธีการหมุนไปข้างหน้าและย้อนกลับ | จำเป็นต้องเปลี่ยนลำดับเฟสการกระตุ้นของวงจรขับ | กลับขั้วแรงดันไฟฟ้าของขาพิน | จำเป็นต้องเปลี่ยนลำดับเฟสการกระตุ้นของวงจรขับ |
| ความสามารถในการควบคุม | สามารถควบคุมความเร็วและตำแหน่งการหมุน (ปริมาณการหมุน) แบบวงเปิดโดยใช้พัลส์คำสั่งได้ (แต่มีปัญหาเรื่องการไม่สอดคล้องกัน) | การหมุนด้วยความเร็วคงที่ต้องอาศัยการควบคุมความเร็ว (การควบคุมแบบป้อนกลับโดยใช้เซ็นเซอร์วัดความเร็ว) เนื่องจากแรงบิดแปรผันตรงกับกระแสไฟฟ้า การควบคุมแรงบิดจึงทำได้ง่าย | |
| การได้รับนั้นง่ายแค่ไหน | ง่ายมาก: มีหลากหลายประเภท | ง่าย: มีผู้ผลิตและสินค้าหลากหลายประเภท ตัวเลือกมากมาย | ข้อจำกัด: ส่วนใหญ่คือต้องใช้มอเตอร์แบบพิเศษสำหรับงานเฉพาะด้าน |
| ราคา | ถ้ามีวงจรขับมอเตอร์รวมอยู่ด้วย ราคาจะสูงขึ้น แต่ก็ยังถูกกว่ามอเตอร์ไร้แปรงถ่าน | มอเตอร์ไร้แกนมีราคาค่อนข้างถูก แต่ราคาสูงขึ้นเล็กน้อยเนื่องจากการอัพเกรดแม่เหล็ก | หากรวมวงจรขับมอเตอร์เข้าไปด้วย ราคาจะสูงขึ้น |
การเปรียบเทียบประสิทธิภาพของมอเตอร์ขนาดเล็กแผนภูมิเรดาร์แสดงการเปรียบเทียบประสิทธิภาพของมอเตอร์ขนาดเล็กต่างๆ
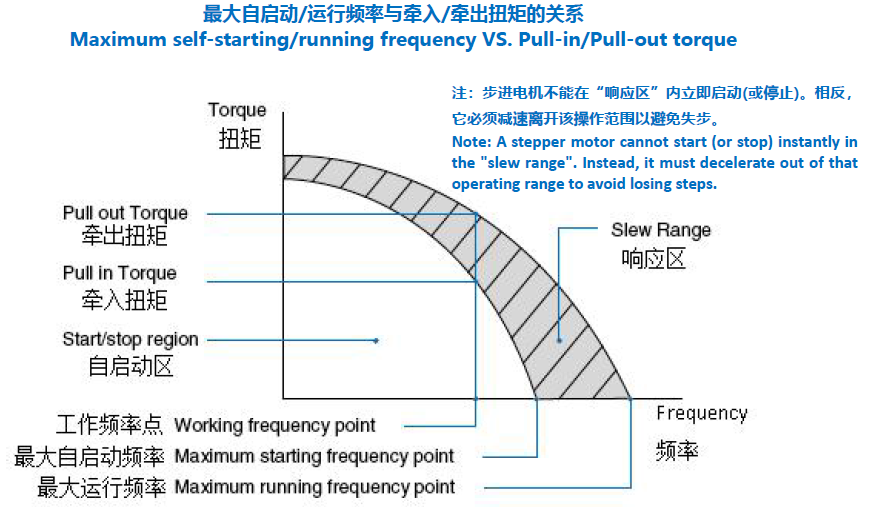
คุณลักษณะความเร็ว-แรงบิดของมอเตอร์ไมโครสเต็ปปิ้ง: ช่วงการทำงานอ้างอิง (การขับเคลื่อนด้วยกระแสคงที่)
● การทำงานต่อเนื่อง (ตามพิกัด): รักษาแรงบิดประมาณ 30% ให้อยู่ในบริเวณการสตาร์ทอัตโนมัติและอยู่นอกบริเวณการทำงานแบบก้าวกระโดด
● การทำงานในช่วงเวลาสั้น (อัตรากำลังในช่วงเวลาสั้น): รักษาแรงบิดให้อยู่ในช่วงประมาณ 50%~60% ในพื้นที่การสตาร์ทเองและพื้นที่นอกช่วงการทำงาน
● อุณหภูมิสูงขึ้น: ต้องเป็นไปตามข้อกำหนดด้านฉนวนของมอเตอร์ภายใต้ช่วงโหลดและสภาพแวดล้อมการใช้งานข้างต้น
สรุปประเด็นสำคัญ:
1) ในการเลือกมอเตอร์ เช่น มอเตอร์แบบมีแปรงถ่าน มอเตอร์แบบสเต็ป และมอเตอร์แบบไร้แปรงถ่าน คุณลักษณะ ประสิทธิภาพ และผลการเปรียบเทียบคุณลักษณะของมอเตอร์ขนาดเล็ก สามารถนำมาใช้เป็นข้อมูลอ้างอิงในการเลือกมอเตอร์ได้
2) ในการเลือกมอเตอร์ เช่น มอเตอร์แบบมีแปรงถ่าน มอเตอร์แบบสเต็ป และมอเตอร์แบบไร้แปรงถ่าน มอเตอร์ในประเภทเดียวกันมักมีสเปคหลายแบบ ดังนั้นผลการเปรียบเทียบคุณลักษณะ ประสิทธิภาพ และคุณสมบัติของมอเตอร์ขนาดเล็กจึงใช้เพื่อเป็นข้อมูลอ้างอิงเท่านั้น
3) เมื่อเลือกมอเตอร์ เช่น มอเตอร์แบบมีแปรงถ่าน มอเตอร์แบบสเต็ป และมอเตอร์แบบไร้แปรงถ่าน ควรตรวจสอบข้อมูลโดยละเอียดจากข้อกำหนดทางเทคนิคของมอเตอร์แต่ละชนิด
วันที่เผยแพร่: 30 มกราคม 2023