เมื่อออกแบบอุปกรณ์ที่ใช้มอเตอร์ แน่นอนว่าจำเป็นต้องเลือกมอเตอร์ที่เหมาะสมที่สุดสำหรับงานที่ต้องการบทความนี้จะเปรียบเทียบคุณลักษณะ ประสิทธิภาพ และคุณลักษณะของมอเตอร์แบบแปรงถ่าน สเต็ปมอเตอร์ และมอเตอร์แบบไร้แปรงถ่าน โดยหวังว่าจะเป็นข้อมูลอ้างอิงสำหรับทุกคนในการเลือกมอเตอร์อย่างไรก็ตาม เนื่องจากมีข้อกำหนดหลายอย่างในประเภทเดียวกันของมอเตอร์ โปรดใช้เพื่อการอ้างอิงเท่านั้นสุดท้าย จำเป็นต้องยืนยันข้อมูลโดยละเอียดผ่านข้อกำหนดทางเทคนิคของมอเตอร์แต่ละตัว
คุณสมบัติของมอเตอร์ขนาดเล็ก: ตารางต่อไปนี้สรุปคุณสมบัติของสเต็ปปิ้งมอเตอร์ มอเตอร์แบบแปรงถ่าน และมอเตอร์แบบไร้แปรงถ่าน
| สเต็ปเปอร์มอเตอร์ | มอเตอร์แบบแปรงถ่าน | มอเตอร์ไร้แปรงถ่าน | |
| วิธีการหมุน | วงจรไดรฟ์ใช้เพื่อกำหนดลำดับของแต่ละเฟส (รวมถึงสองเฟส สามเฟส และห้าเฟส) ของขดลวดกระดอง
| กระแสกระดองถูกเปลี่ยนผ่านกลไกวงจรเรียงกระแสหน้าสัมผัสแบบเลื่อนของแปรงและตัวสับเปลี่ยน | ไร้แปรงเกิดขึ้นจากการแทนที่แปรงและเครื่องสับเปลี่ยนด้วยเซ็นเซอร์ตำแหน่งขั้วแม่เหล็กและสวิตช์เซมิคอนดักเตอร์
|
| วงจรขับ | ความต้องการ | ที่ไม่พึงประสงค์ | ความต้องการ |
| แรงบิด | แรงบิดค่อนข้างมาก(โดยเฉพาะแรงบิดที่ความเร็วต่ำ)
| แรงบิดเริ่มต้นมีขนาดใหญ่และแรงบิดเป็นสัดส่วนกับกระแสกระดอง(แรงบิดค่อนข้างมากที่ความเร็วปานกลางถึงสูง) | |
| ความเร็วในการหมุน | แรงบิดค่อนข้างมาก(โดยเฉพาะแรงบิดที่ความเร็วต่ำ)
| เป็นสัดส่วนกับแรงดันไฟฟ้าที่ใช้กับกระดองความเร็วจะลดลงเมื่อแรงบิดโหลดเพิ่มขึ้น | |
| การหมุนด้วยความเร็วสูง | เป็นสัดส่วนกับความถี่พัลส์อินพุตอยู่นอกพื้นที่ขั้นในช่วงความเร็วต่ำ หมุนด้วยความเร็วสูงได้ยาก (ต้องช้าลง) | เนื่องจากข้อ จำกัด ของกลไกวงจรเรียงกระแสของแปรงและตัวสับเปลี่ยนความเร็วสูงสุดจึงสามารถเข้าถึงหลายพันรอบต่อนาที | ถึงพันถึงหมื่นรอบต่อนาที
|
| ชีวิตหมุนเวียน | มันถูกกำหนดโดยชีวิตแบกนับหมื่นชั่วโมง
| ถูกจำกัดด้วยการสึกหรอของแปรงและคอมมิวเตเตอร์หลายร้อยถึงหลายพันชั่วโมง
| มันถูกกำหนดโดยชีวิตแบกนับหมื่นถึงแสนชั่วโมง
|
| วิธีการหมุนไปข้างหน้าและย้อนกลับ | จำเป็นต้องเปลี่ยนลำดับของขั้นตอนการกระตุ้นของวงจรไดรฟ์
| กลับขั้วของแรงดันพิน
| จำเป็นต้องเปลี่ยนลำดับของขั้นตอนการกระตุ้นของวงจรไดรฟ์
|
| ความสามารถในการควบคุม | การควบคุมวงเปิดของความเร็วและตำแหน่งการหมุน (จำนวนการหมุน) ที่กำหนดโดยพัลส์คำสั่งสามารถทำได้ (แต่มีปัญหานอกขั้นตอน) | การหมุนความเร็วคงที่ต้องมีการควบคุมความเร็ว (การควบคุมป้อนกลับโดยใช้เซ็นเซอร์ความเร็ว)เนื่องจากแรงบิดเป็นสัดส่วนกับกระแสไฟฟ้า การควบคุมแรงบิดจึงเป็นเรื่องง่าย | |
| มันง่ายแค่ไหนที่จะได้รับ | ง่าย: มีหลายพันธุ์ | ง่าย:ผู้ผลิตจำนวนมากและหลากหลาย ตัวเลือกมากมาย
| ความยาก: ส่วนใหญ่เป็นมอเตอร์พิเศษสำหรับการใช้งานเฉพาะ |
| ราคา | ถ้ารวมวงจรขับด้วยก็แพงครับราคาถูกกว่ามอเตอร์ไร้แปรงถ่าน
| มอเตอร์ไร้แกนราคาถูกค่อนข้างแพงเนื่องจากอัพเกรดแม่เหล็ก | ถ้ารวมวงจรขับด้วยก็แพงครับ
|
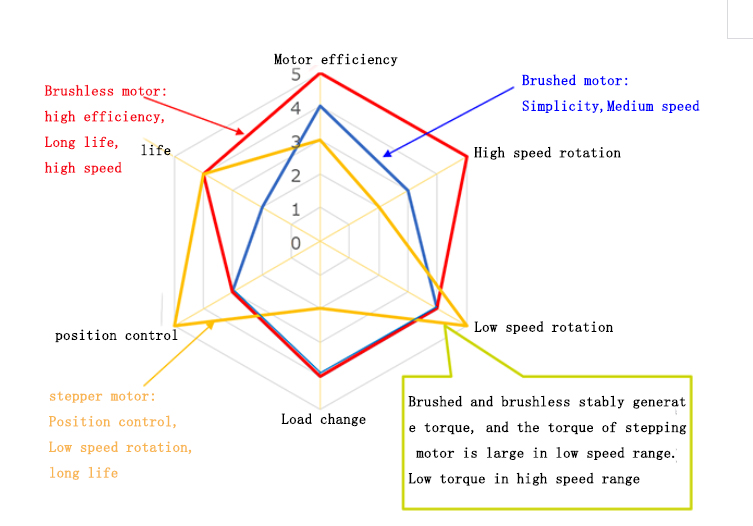
การเปรียบเทียบประสิทธิภาพของมอเตอร์ขนาดเล็ก: แผนภูมิเรดาร์แสดงการเปรียบเทียบประสิทธิภาพของมอเตอร์ขนาดเล็กต่างๆ
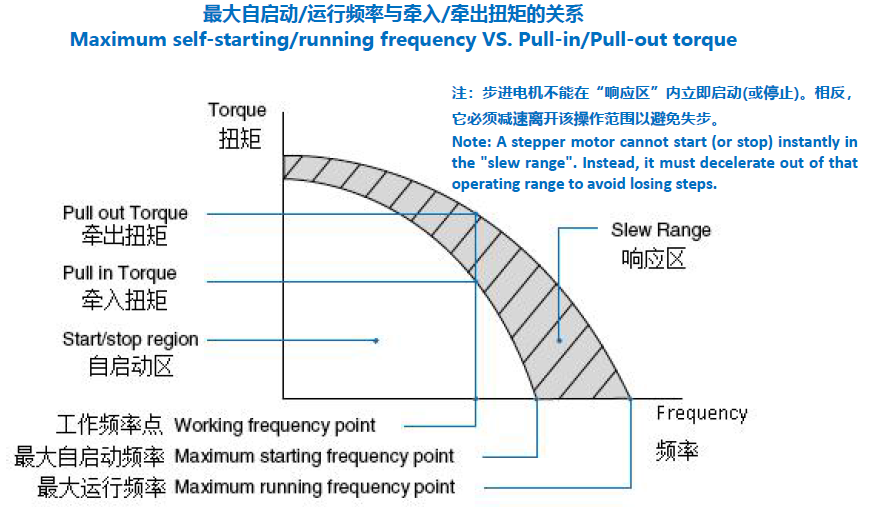
ลักษณะแรงบิดความเร็วของไมโครสเต็ปปิ้งมอเตอร์: การอ้างอิงช่วงการทำงาน (ไดรฟ์ปัจจุบันคงที่)
● การทำงานต่อเนื่อง (จัดอันดับ): รักษาแรงบิดไว้ประมาณ 30% ในบริเวณสตาร์ทเองและนอกสเต็ป
● การทำงานโดยใช้เวลาสั้น (พิกัดเวลาสั้น): รักษาแรงบิดให้อยู่ในช่วงประมาณ 50%~60% ในพื้นที่สตาร์ทเองและนอกพื้นที่ขั้นบันได
● อุณหภูมิที่เพิ่มขึ้น: เป็นไปตามข้อกำหนดเกรดฉนวนของมอเตอร์ภายใต้ช่วงโหลดและสภาพแวดล้อมการบริการข้างต้น
สรุปประเด็นสำคัญ:
1) เมื่อเลือกมอเตอร์ เช่น มอเตอร์แปรงถ่าน สเต็ปมอเตอร์ และมอเตอร์ไร้แปรงถ่าน คุณลักษณะ ประสิทธิภาพ และผลการเปรียบเทียบลักษณะเฉพาะของมอเตอร์ขนาดเล็กสามารถใช้เป็นข้อมูลอ้างอิงในการเลือกมอเตอร์ได้
2) เมื่อเลือกมอเตอร์ เช่น มอเตอร์แบบแปรงถ่าน สเต็ปมอเตอร์ และมอเตอร์แบบไร้แปรงถ่าน มอเตอร์ประเภทเดียวกันจะมีข้อกำหนดหลายประการ ดังนั้นผลการเปรียบเทียบคุณลักษณะ ประสิทธิภาพ และคุณลักษณะเฉพาะของมอเตอร์ขนาดเล็กจะใช้สำหรับการอ้างอิงเท่านั้น
3) เมื่อเลือกมอเตอร์ เช่น มอเตอร์แบบแปรงถ่าน สเต็ปมอเตอร์ และมอเตอร์แบบไร้แปรงถ่าน ข้อมูลรายละเอียดจะต้องได้รับการยืนยันผ่านข้อกำหนดทางเทคนิคของมอเตอร์แต่ละตัว
เวลาโพสต์: ม.ค.-04-2566