มอเตอร์สเต็ปเปอร์มีสองประเภท ได้แก่ แบบต่อขั้วคู่และแบบต่อขั้วเดี่ยว แต่ละประเภทมีข้อดีและข้อเสียแตกต่างกัน ดังนั้นคุณจึงต้องทำความเข้าใจลักษณะเฉพาะของแต่ละประเภทและเลือกใช้ให้เหมาะสมกับความต้องการของคุณแอปพลิเคชันความต้องการ
การเชื่อมต่อแบบไบโพลาร์
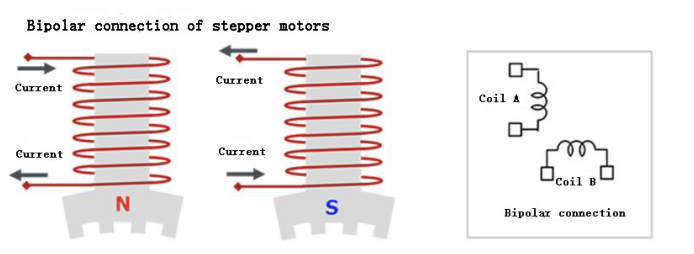
วิธีการต่อแบบไบโพลาร์ ดังแสดงในรูป ใช้ระบบขับเคลื่อนที่กระแสไฟฟ้าไหลในทั้งสองทิศทางในขดลวดเดียว (การขับเคลื่อนแบบไบโพลาร์) มอเตอร์ในลักษณะนี้มีโครงสร้างที่เรียบง่ายกว่าและมีขั้วต่อน้อยกว่า แต่วงจรขับเคลื่อนจะซับซ้อนกว่าเนื่องจากต้องควบคุมขั้วของขั้วต่อหนึ่ง อย่างไรก็ตาม มอเตอร์ประเภทนี้มีการใช้ขดลวดอย่างมีประสิทธิภาพและช่วยให้ควบคุมได้อย่างละเอียด จึงสามารถสร้างแรงบิดเอาต์พุตสูงได้ นอกจากนี้ยังสามารถลดแรงเคลื่อนไฟฟ้าต้านกลับที่เกิดขึ้นในขดลวดได้ ทำให้สามารถใช้มอเตอร์ขับเคลื่อนที่มีแรงดันไฟฟ้าทนต่ำกว่าได้
การเชื่อมต่อแบบขั้วเดียว
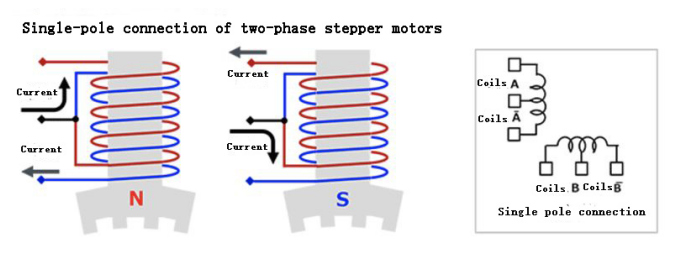
ดังแสดงในรูป การต่อแบบขั้วเดี่ยวมีจุดต่อตรงกลางและใช้วิธีการขับเคลื่อนที่กระแสไฟฟ้าไหลในทิศทางคงที่ในขดลวดเพียงขดเดียว (การขับเคลื่อนแบบขั้วเดี่ยว) แม้ว่าโครงสร้างของมอเตอร์สเต็ปเปอร์จะซับซ้อนกว่า แต่วงจรขับเคลื่อนของมอเตอร์สเต็ปเปอร์นั้นง่ายกว่า เนื่องจากต้องการเพียงการควบคุมการเปิด/ปิดกระแสไฟฟ้าเท่านั้น อย่างไรก็ตาม การใช้ประโยชน์จากขดลวดนั้นไม่ดีนัก และจะได้แรงบิดเอาต์พุตเพียงประมาณครึ่งหนึ่งเมื่อเทียบกับการต่อแบบสองขั้ว นอกจากนี้ เนื่องจากกระแสไฟฟ้าที่เปิด/ปิดจะสร้างแรงเคลื่อนไฟฟ้าต้านกลับสูงในขดลวด จึงจำเป็นต้องใช้ตัวขับมอเตอร์ที่มีแรงดันไฟฟ้าทนสูง
ประเด็นสำคัญ
การเชื่อมต่อแบบไบโพลาร์ของมอเตอร์สเต็ปเปอร์
ใช้ระบบขับเคลื่อนแบบที่กระแสไฟฟ้าไหลในทั้งสองทิศทางในขดลวดเดียว (ระบบขับเคลื่อนแบบไบโพลาร์)
โครงสร้างเรียบง่าย แต่มีวงจรขับที่ซับซ้อนสำหรับมอเตอร์สเต็ปเปอร์.
การใช้ประโยชน์จากขดลวดทำได้ดีและสามารถควบคุมได้อย่างละเอียด ทำให้มอเตอร์สเต็ปเปอร์สามารถสร้างแรงบิดเอาต์พุตสูงได้
สามารถลดแรงเคลื่อนไฟฟ้าต้านกลับที่เกิดขึ้นในขดลวดได้ ดังนั้นจึงสามารถใช้ตัวขับมอเตอร์ที่มีแรงดันไฟฟ้าทนต่ำได้
การเชื่อมต่อแบบขั้วเดียวของมอเตอร์สเต็ปเปอร์
วิธีการขับเคลื่อนที่มีจุดต่อตรงกลางและใช้ขดลวดที่กระแสไฟฟ้าไหลในทิศทางคงที่เสมอ (การขับเคลื่อนแบบขั้วเดียว)
โครงสร้างซับซ้อน แต่มีวงจรขับที่เรียบง่ายสำหรับมอเตอร์สเต็ปเปอร์
การใช้ขดลวดที่ไม่เต็มประสิทธิภาพ ทำให้ได้แรงบิดเอาต์พุตของมอเตอร์สเต็ปเปอร์เพียงครึ่งเดียวเมื่อเทียบกับการต่อแบบไบโพลาร์
จำเป็นต้องใช้ตัวขับมอเตอร์ที่มีแรงดันไฟฟ้าทนทานสูง เนื่องจากเกิดแรงเคลื่อนไฟฟ้าต้านกลับสูงในขดลวด
วันที่โพสต์: 9 พฤศจิกายน 2022