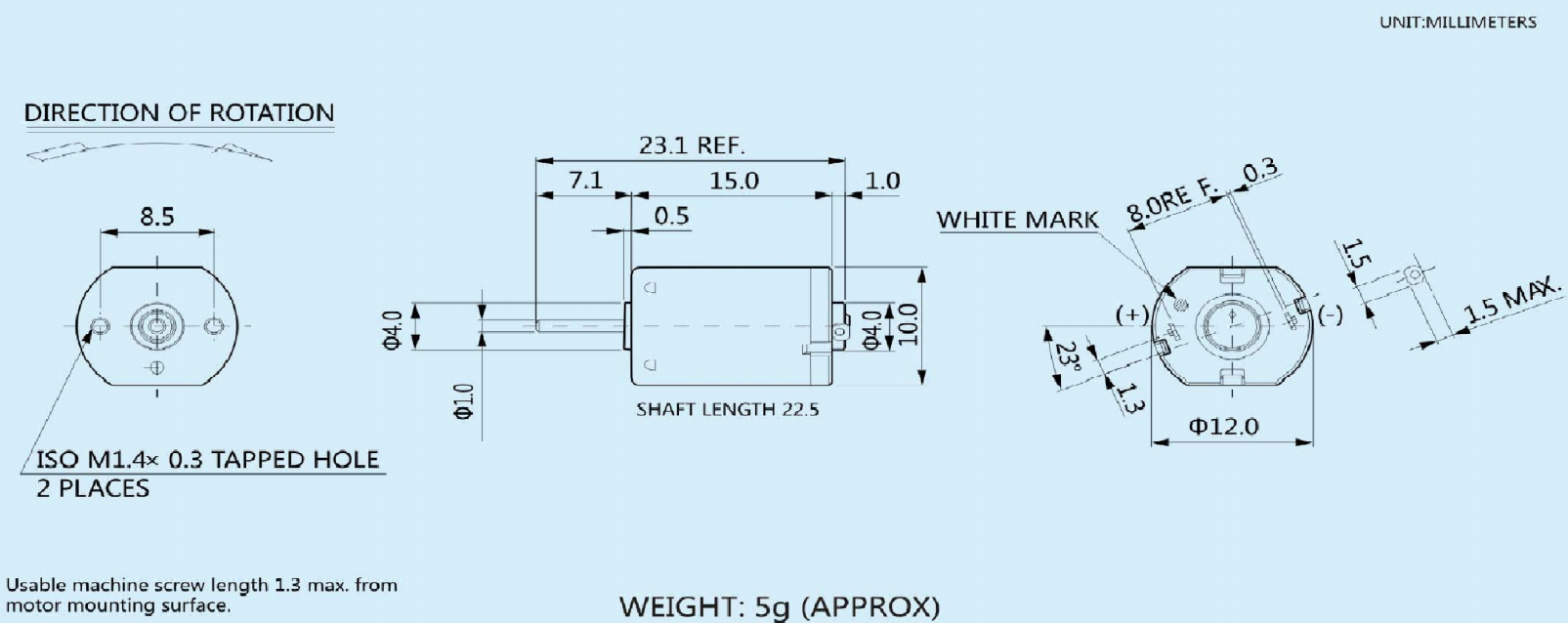
มอเตอร์ DC N20(มอเตอร์ DC รุ่น N20 มีเส้นผ่านศูนย์กลาง 12 มม. ความหนา 10 มม. และความยาว 15 มม. รุ่น N30 ที่ยาวกว่า และรุ่น N10 ที่สั้นกว่า)

มอเตอร์ DC N20พารามิเตอร์
ผลงาน :
1. ประเภทมอเตอร์: มอเตอร์ DC แบบแปรงถ่าน
2. แรงดันไฟฟ้า: 3V-12VDC
3. ความเร็วรอบ (ขณะเดินเบา): 3000-20000 รอบต่อนาที
4. แรงบิด: 1 กรัม-2 กรัม
5. เส้นผ่านศูนย์กลางเพลา: 1.0 มม.
6. ทิศทาง: ตามเข็มนาฬิกา/ทวนเข็มนาฬิกา
7. แบริ่งเพลาส่งกำลัง: แบริ่งน้ำมัน
8. รายการที่สามารถปรับแต่งได้: ความยาวเพลา (สามารถติดตั้งตัวเข้ารหัสบนเพลาได้), แรงดันไฟฟ้า, ความเร็ว, วิธีการต่อสายไฟ และขั้วต่อ เป็นต้น
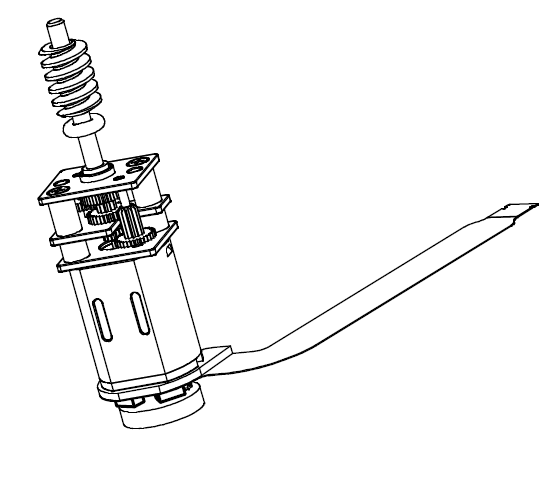
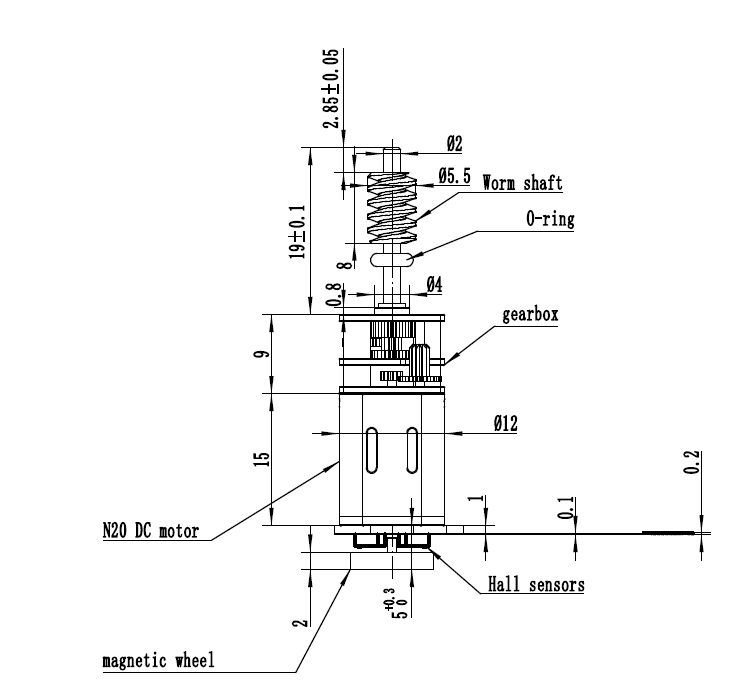
ผลิตภัณฑ์สั่งทำพิเศษสำหรับมอเตอร์ DC รุ่น N20 (ตัวอย่างจริง)
มอเตอร์ DC N20 + เกียร์บ็อกซ์ + เพลาหนอน + ตัวเข้ารหัสด้านล่าง + FPC แบบกำหนดเอง + แหวนยางบนเพลา
กราฟแสดงสมรรถนะของมอเตอร์ DC รุ่น N20 (รุ่นความเร็วรอบขณะไม่มีโหลด 12V 16000 รอบต่อนาที)
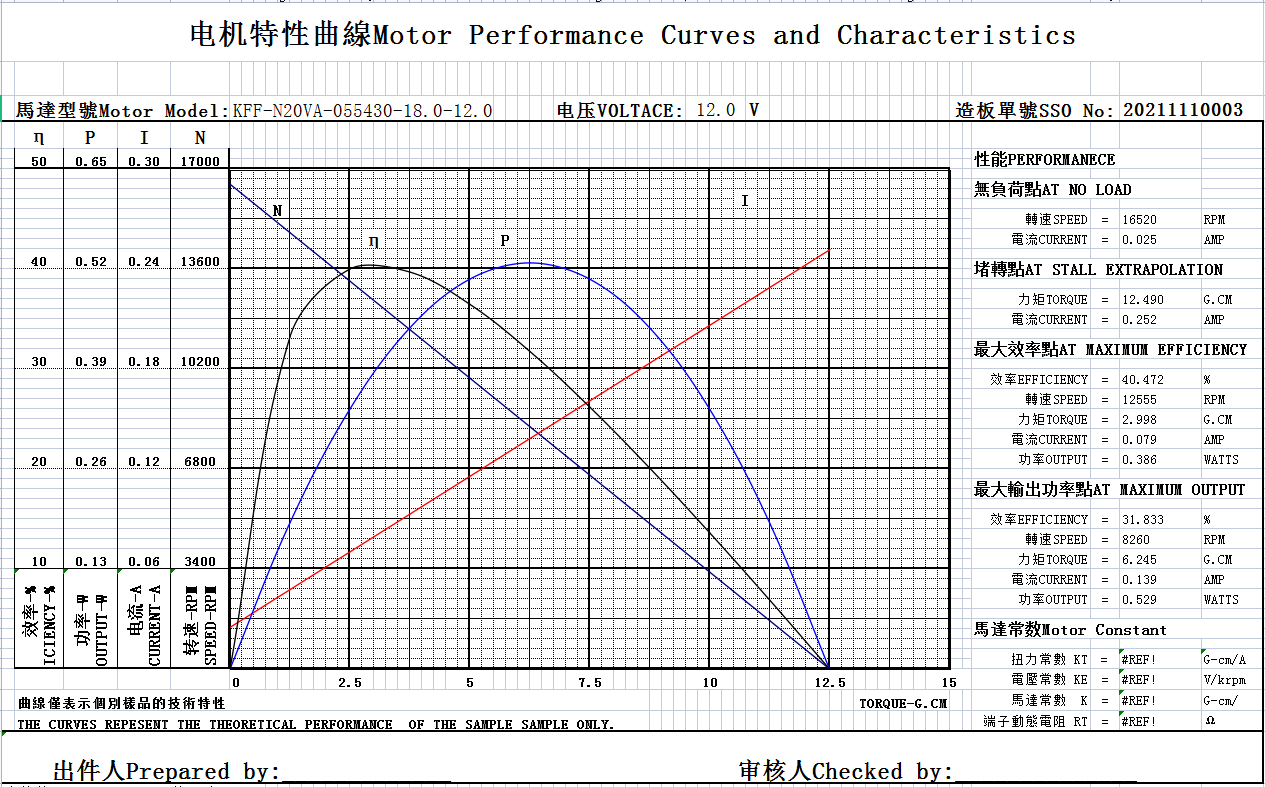
ลักษณะและวิธีการทดสอบของมอเตอร์ DC.
1. ที่แรงดันไฟฟ้าพิกัด ความเร็วสูงสุด กระแสไฟฟ้าต่ำสุด เมื่อโหลดเพิ่มขึ้น ความเร็วจะลดลงเรื่อยๆ กระแสไฟฟ้าจะเพิ่มขึ้นเรื่อยๆ จนกระทั่งมอเตอร์หยุดทำงาน ความเร็วของมอเตอร์จะเป็น 0 และกระแสไฟฟ้าสูงสุด
2. ยิ่งแรงดันไฟฟ้าสูง มอเตอร์ก็จะยิ่งหมุนเร็วขึ้น
มาตรฐานการตรวจสอบสินค้าขนส่งทั่วไป
การทดสอบความเร็วขณะไม่มีโหลด: ตัวอย่างเช่น กำลังไฟพิกัด 12V ความเร็วขณะไม่มีโหลด 16000 รอบต่อนาที
ค่ามาตรฐานในการทดสอบขณะไม่มีโหลดควรอยู่ระหว่าง 14400~17600 รอบต่อนาที (คลาดเคลื่อนไม่เกิน 10%) มิฉะนั้นถือว่าผิดปกติ
ตัวอย่างเช่น กระแสไฟฟ้าขณะไม่มีโหลดควรอยู่ภายใน 30 มิลลิแอมป์ มิฉะนั้นถือว่าผิดปกติ
เมื่อเพิ่มน้ำหนักบรรทุกตามที่กำหนด ความเร็วควรสูงกว่าความเร็วที่กำหนดไว้
ตัวอย่างเช่น: มอเตอร์ DC N20 พร้อมเกียร์ทดรอบ 298:1 รับน้ำหนัก 500 กรัม*ซม. ความเร็วรอบควรสูงกว่า 11500 รอบต่อนาที มิฉะนั้นจะเกิดปัญหา
ข้อมูลการทดสอบจริงของมอเตอร์เกียร์ DC รุ่น N20
วันสอบ: 13 พฤศจิกายน 2565
ผู้ทดสอบ: โทนี่ วิศวกรของ Vikotec
สถานที่ทดสอบ: โรงงาน Vikotec
สินค้า: มอเตอร์ DC รุ่น N20 + เกียร์ทดรอบ
แรงดันไฟฟ้าที่ใช้ทดสอบ: 12V
ความเร็วรอบขณะไม่มีโหลดของมอเตอร์: 16000 รอบต่อนาที
รุ่นที่สองในเดือนกรกฎาคม
อัตราส่วนการลดลง: 298:1
ความต้านทาน: 47.8 โอห์ม
ความเร็วรอบขณะไม่มีโหลด (ไม่รวมเกียร์): 16508 รอบต่อนาที
กระแสไฟขณะไม่มีโหลด: 15 มิลลิแอมป์
| หมายเลขประจำเครื่อง | กระแสไฟฟ้าขณะไม่มีโหลด (มิลลิแอมป์) | ความเร็วขณะไม่มีโหลด(รอบต่อนาที) | 500 กรัม*ซม.กระแสโหลด (มิลลิแอมป์) | ความเร็วในการรับน้ำหนัก 500 กรัม*ซม.(รอบต่อนาที) | กระแสไฟฟ้าที่ถูกปิดกั้น(รอบต่อนาที) |
| 1 | 16 | 16390 | 59 | 12800 | 215 |
| 2 | 18 | 16200 | 67 | 12400 | 234 |
| 3 | 18 | 16200 | 67 | 12380 | 220 |
| 4 | 20 | 16080 | 62 | 12400 | 228 |
| 5 | 17 | 16400 | 68 | 12420 | 231 |
| ค่าเฉลี่ย | 18 | 16254 | 65 | 12480 | 226 |
รุ่นที่สองในเดือนกรกฎาคม
อัตราส่วนการลดความเร็ว: 420:1
ความต้านทาน: 47.8 โอห์ม
ความเร็วรอบขณะไม่มีโหลด (ไม่รวมเกียร์): 16500 รอบต่อนาที
กระแสไฟขณะไม่มีโหลด: 15 มิลลิแอมป์
| หมายเลขประจำเครื่อง | กระแสไฟฟ้าขณะไม่มีโหลด (มิลลิแอมป์) | ความเร็วขณะไม่มีโหลด(รอบต่อนาที) | 500 กรัม*ซม.กระแสโหลด (มิลลิแอมป์) | ความเร็วในการรับน้ำหนัก 500 กรัม*ซม.(รอบต่อนาที) | กระแสไฟฟ้าที่ถูกปิดกั้น(รอบต่อนาที) |
| 1 | 15 | 16680 | 49 | 13960 | 231 |
| 2 | 25 | 15930 | 60 | 13200 | 235 |
| 3 | 19 | 16080 | 57 | 13150 | 230 |
| 4 | 21 | 15800 | 53 | 13300 | 233 |
| 5 | 20 | 16000 | 55 | 13400 | 238 |
| ค่าเฉลี่ย | 20 | 16098 | 55 | 13402 | 233 |
รุ่น: รุ่นที่สามในเดือนกันยายน
อัตราส่วนการลดความเร็ว: 298:1
ความต้านทาน: 47.6 โอห์ม
ความเร็วรอบขณะไม่มีโหลด (ไม่รวมเกียร์): 15850 รอบต่อนาที
กระแสไฟขณะไม่มีโหลด: 13 มิลลิแอมป์
| หมายเลขประจำเครื่อง | กระแสไฟฟ้าขณะไม่มีโหลด (มิลลิแอมป์) | ความเร็วขณะไม่มีโหลด(รอบต่อนาที) | 500 กรัม*ซม.กระแสโหลด (มิลลิแอมป์) | ความเร็วในการรับน้ำหนัก 500 กรัม*ซม.(รอบต่อนาที) | กระแสไฟฟ้าที่ถูกปิดกั้น(รอบต่อนาที) |
| 1 | 16 | 15720 | 64 | 12350 | 219 |
| 2 | 18 | 15390 | 63 | 12250 | 200 |
| 3 | 18 | 15330 | 63 | 11900 | 219 |
| 4 | 20 | 15230 | 62 | 12100 | 216 |
| 5 | 18 | 15375 | 61 | 12250 | 228 |
| ค่าเฉลี่ย | 18 | 15409 | 63 | 12170 | 216 |
รุ่น: รุ่นที่สามในเดือนกันยายน
อัตราส่วนการลดลง: 420:1
ความต้านทาน: 47.6 โอห์ม
ความเร็วรอบขณะไม่มีโหลด (ไม่รวมเกียร์): 15680 รอบต่อนาที
กระแสไฟขณะไม่มีโหลด: 17 มิลลิแอมป์
| หมายเลขประจำเครื่อง | กระแสไฟฟ้าขณะไม่มีโหลด (มิลลิแอมป์) | ความเร็วขณะไม่มีโหลด(รอบต่อนาที) | 500 กรัม*ซม.กระแสโหลด (มิลลิแอมป์) | ความเร็วในการรับน้ำหนัก 500 กรัม*ซม.(รอบต่อนาที) | กระแสไฟฟ้าที่ถูกปิดกั้น(รอบต่อนาที) |
| 1 | 18 | 15615 | 54 | 12980 | 216 |
| 2 | 18 | 15418 | 49 | 13100 | 210 |
| 3 | 18 | 15300 | 50 | 12990 | 219 |
| 4 | 17 | 15270 | 50 | 13000 | 222 |
| 5 | 16 | 15620 | 50 | 13160 | 217 |
| ค่าเฉลี่ย | 17 | 15445 | 51 | 13046 | 217 |
หลักการทำงานของมอเตอร์ไฟฟ้ากระแสตรง N20
ตัวนำที่มีพลังงานอยู่ในสนามแม่เหล็กจะได้รับแรงในทิศทางใดทิศทางหนึ่ง
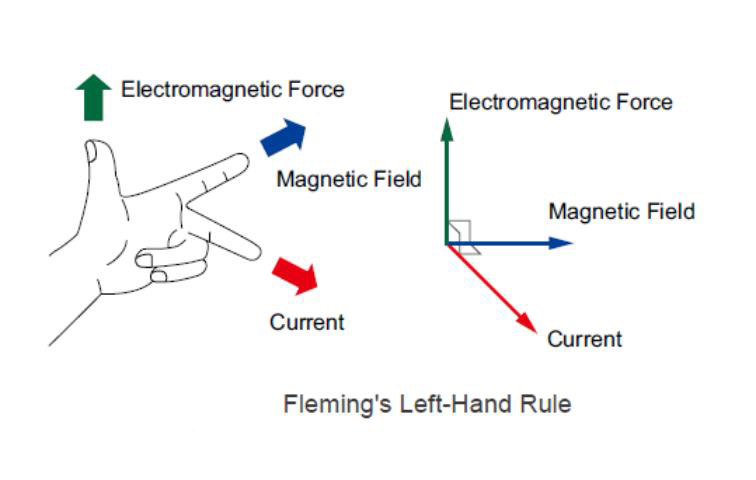
กฎมือซ้ายของเฟลมมิง
ทิศทางของสนามแม่เหล็กคือทิศทางของนิ้วชี้ ทิศทางของกระแสไฟฟ้าคือทิศทางของนิ้วกลาง และทิศทางของแรงคือทิศทางของนิ้วโป้ง
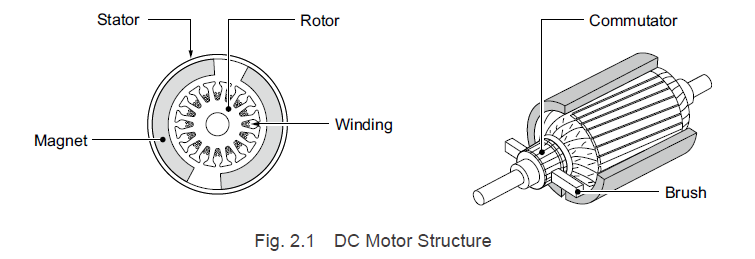
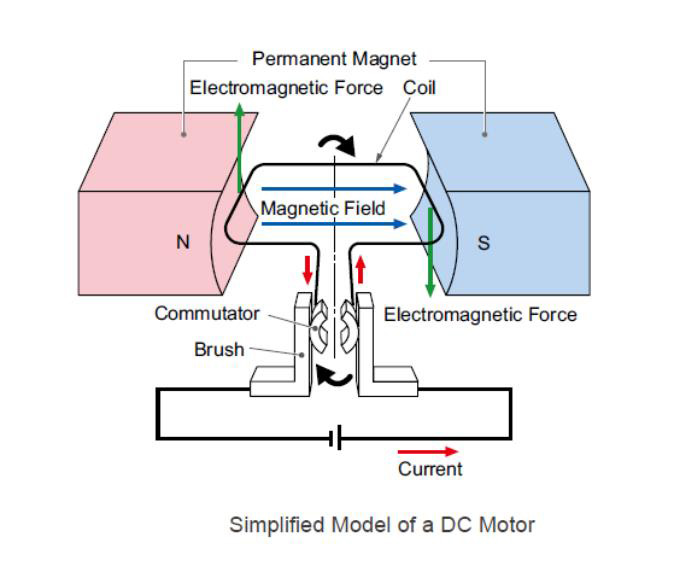
โครงสร้างภายในของมอเตอร์กระแสตรง N20
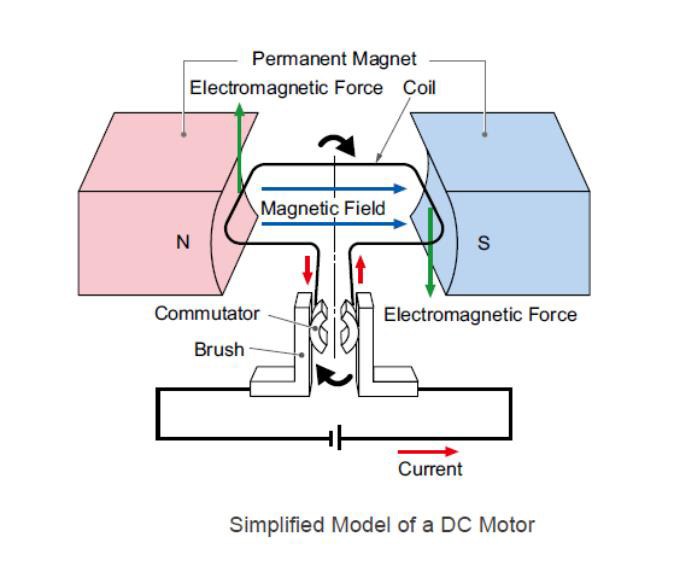
การวิเคราะห์ทิศทางที่โรเตอร์ (ขดลวด) ได้รับในมอเตอร์กระแสตรง1
เมื่อได้รับแรงแม่เหล็กไฟฟ้าในทิศทางที่กำหนด ขดลวดจะหมุนตามเข็มนาฬิกา โดยทิศทางของแรงแม่เหล็กไฟฟ้าที่กระทำต่อลวดด้านซ้าย (หันขึ้น) และทิศทางของแรงแม่เหล็กไฟฟ้าที่กระทำต่อลวดด้านขวา (หันลง) จะอยู่ในทิศทางเดียวกัน
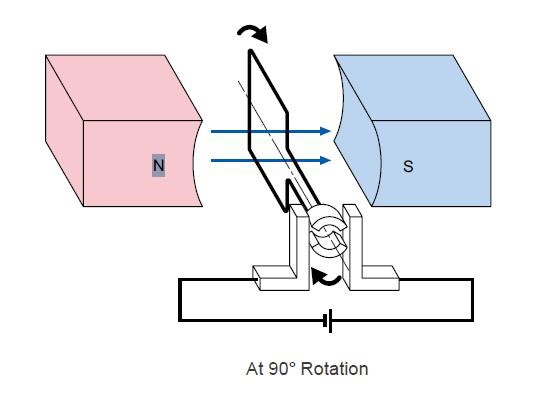
การวิเคราะห์ทิศทางที่โรเตอร์ (ขดลวด) ในมอเตอร์ได้รับแรงกระทำ2.
เมื่อขดลวดตั้งฉากกับสนามแม่เหล็ก มอเตอร์จะไม่ได้รับแรงจากสนามแม่เหล็ก อย่างไรก็ตาม เนื่องจากแรงเฉื่อย ขดลวดจะยังคงเคลื่อนที่ต่อไปอีกเล็กน้อย ในช่วงเวลาสั้นๆ นี้ คอมมิวเทเตอร์และแปรงถ่านจะไม่สัมผัสกัน เมื่อขดลวดหมุนตามเข็มนาฬิกาต่อไป คอมมิวเทเตอร์และแปรงถ่านก็จะสัมผัสกันซึ่งจะทำให้ทิศทางของกระแสไฟฟ้าเปลี่ยนไป
การวิเคราะห์ทิศทางที่โรเตอร์ (ขดลวด) ในมอเตอร์ได้รับแรงกระทำ 3.
เนื่องจากมีคอมมิวเทเตอร์และแปรงถ่าน กระแสไฟฟ้าจึงเปลี่ยนทิศทางทุกๆ ครึ่งรอบการหมุนของมอเตอร์ ด้วยวิธีนี้ มอเตอร์จึงจะหมุนตามเข็มนาฬิกาอย่างต่อเนื่อง เนื่องจากคอมมิวเทเตอร์และแปรงถ่านมีความจำเป็นต่อการเคลื่อนที่อย่างต่อเนื่องของมอเตอร์ มอเตอร์กระแสตรง N20 จึงถูกเรียกว่า "มอเตอร์แบบมีแปรงถ่าน"
ทิศทางของแรงแม่เหล็กไฟฟ้าที่กระทำต่อลวดด้านซ้าย (หันขึ้นด้านบน) และลวดด้านขวา
ทิศทางของแรงแม่เหล็กไฟฟ้า (หันลงด้านล่าง)
ข้อดีของมอเตอร์ DC รุ่น N20
1. ราคาถูก
2. ความเร็วในการหมุนสูง
3. การเดินสายไฟแบบง่าย มีสองขา ขาหนึ่งต่อกับขั้วบวก อีกขาต่อกับขั้วลบ เสียบแล้วใช้งานได้เลย
4. ประสิทธิภาพของมอเตอร์นี้สูงกว่ามอเตอร์สเต็ปเปอร์
วันที่โพสต์: 16 พฤศจิกายน 2022