


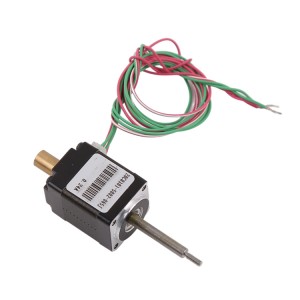
มอเตอร์สเต็ปเปอร์ไฮบริด NEMA8 ขนาด 20 มม. มุมก้าว 1.8 องศา เพลา D
คำอธิบาย
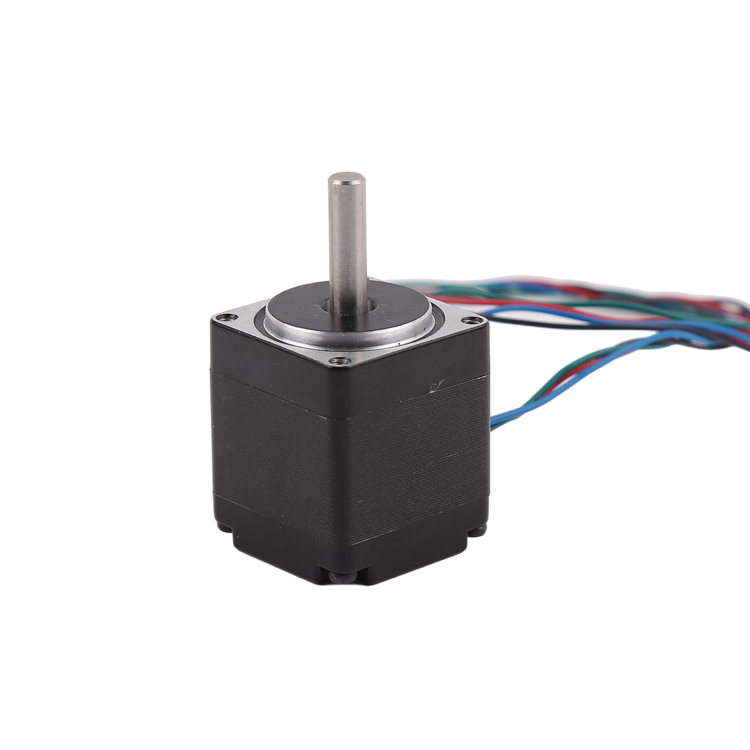
มอเตอร์ NEMA8 นี้เป็นมอเตอร์สเต็ปเปอร์แบบไฮบริดขนาด 20 มม.
มอเตอร์นี้เป็นมอเตอร์สเต็ปปิ้งไฮบริดขนาดเล็กที่มีความแม่นยำสูง รูปลักษณ์สวยงาม และประสิทธิภาพยอดเยี่ยม
มุมการหมุนแต่ละขั้นคือ 1.8° ซึ่งหมายความว่าต้องใช้ 200 ขั้นในการหมุนครบหนึ่งรอบ
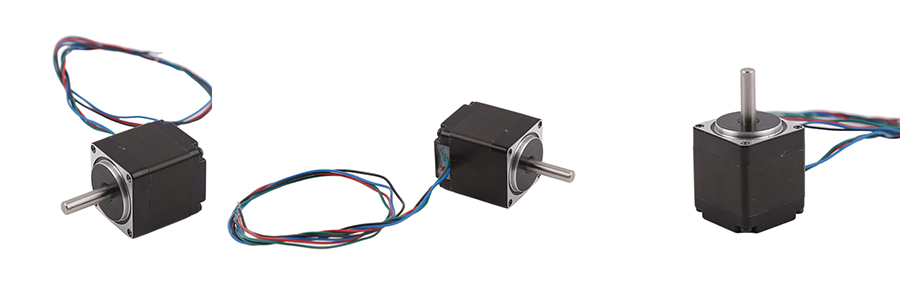
มอเตอร์มีความยาว 30 มม., 38 มม. และ 42 มม. ยิ่งมอเตอร์ยาวเท่าไหร่ แรงบิดก็จะยิ่งสูงขึ้นเท่านั้น
ประแจขนาด 42 มม. มีแรงบิดมากกว่า ในขณะที่ประแจขนาด 30 มม. มีขนาดเล็กกว่า
ลูกค้าสามารถเลือกความยาวได้ตามแรงบิดและพื้นที่ที่ต้องการ
นอกจากนี้ เรายังมีบริการปรับแต่งตามความต้องการของลูกค้าอีกด้วย
ลูกค้าสามารถเลือกพารามิเตอร์ด้านล่างตามความต้องการได้ โปรดติดต่อเราหากมีข้อสงสัยเกี่ยวกับมอเตอร์ เราพร้อมให้การสนับสนุนอย่างมืออาชีพเพิ่มเติม
พารามิเตอร์
| มุมขั้นบันได () | ความยาวของมอเตอร์ (มม.) | แรงบิดยึด (กรัม*ซม.) | ปัจจุบัน /เฟส (เฟส A) |
ความต้านทาน (โอห์ม/เฟส) | ความเหนี่ยวนำ (มิลลิเฮนรี/เฟส) | จำนวน ผู้นำ | ความเฉื่อยในการหมุน (กรัม*ซม.)2) | น้ำหนัก (กก.) |
| 1.8 | 30 | 180 | 0.6 | 6.5 | 1.7 | 4 | 1.6 | 0.06 |
| 1.8 | 38 | 300 | 0.6 | 10 | 2.5 | 4 | 2.2 | 0.08 |
| 1.8 | 42 | 300 | 0.8 | 5.4 | 1.5 | 4 | 2.9 | 0.06 |
พารามิเตอร์ข้างต้นเป็นข้อมูลอ้างอิงมาตรฐานของผลิตภัณฑ์ มอเตอร์สามารถปรับแต่งได้ตามความต้องการของลูกค้า
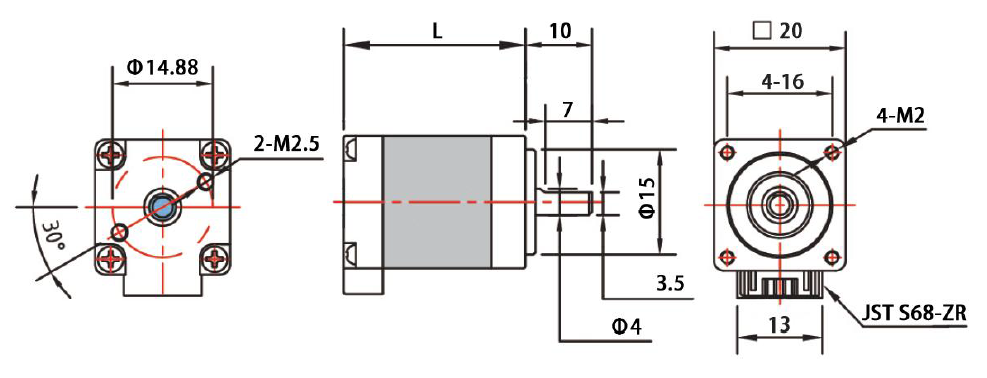
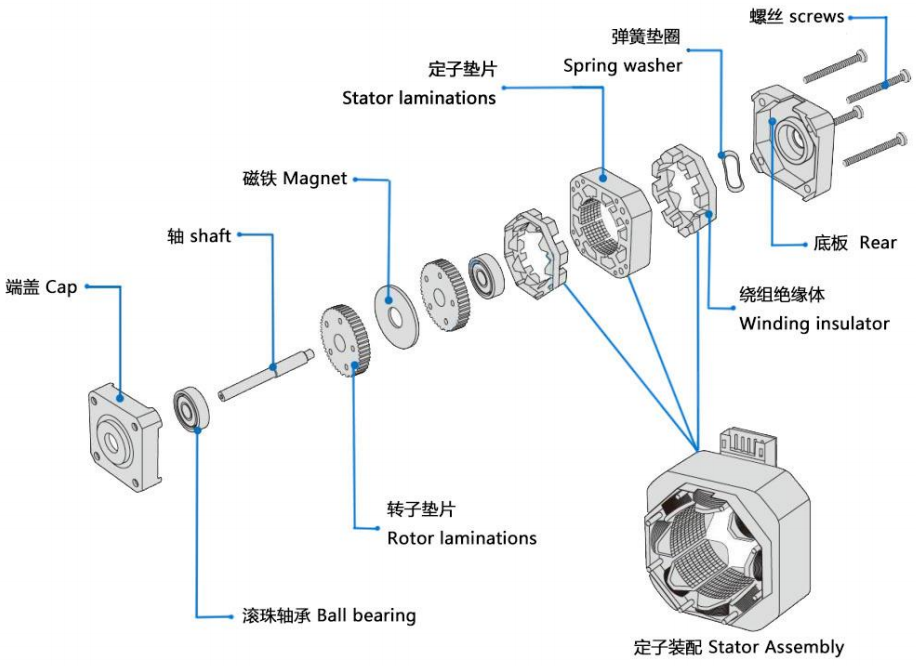
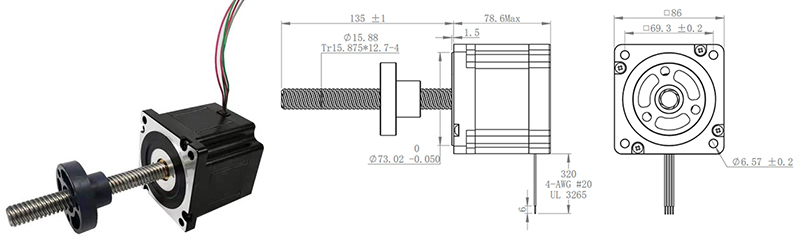
แบบร่างการออกแบบ
โครงสร้างพื้นฐานของมอเตอร์สเต็ปเปอร์ NEMA
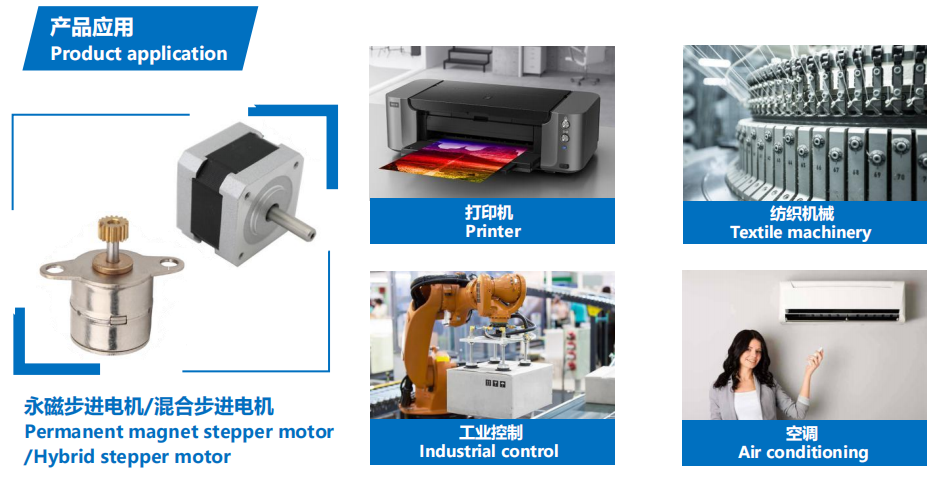
การประยุกต์ใช้มอเตอร์สเต็ปเปอร์แบบไฮบริด
เนื่องจากมอเตอร์สเต็ปเปอร์แบบไฮบริดมีความละเอียดสูง (200 หรือ 400 สเต็ปต่อรอบ) จึงมีการใช้งานอย่างแพร่หลายในงานที่ต้องการความแม่นยำสูง เช่น:
การพิมพ์ 3 มิติ
ระบบควบคุมอุตสาหกรรม (เครื่อง CNC, เครื่องกัดอัตโนมัติ, เครื่องจักรสิ่งทอ)
อุปกรณ์ต่อพ่วงคอมพิวเตอร์
เครื่องบรรจุภัณฑ์
และระบบอัตโนมัติอื่นๆ ที่ต้องการการควบคุมที่มีความแม่นยำสูง
หมายเหตุการใช้งานเกี่ยวกับมอเตอร์สเต็ปเปอร์แบบไฮบริด
ลูกค้าควรยึดหลักการ “เลือกมอเตอร์สเต็ปเปอร์ก่อน จากนั้นจึงเลือกไดรเวอร์โดยพิจารณาจากมอเตอร์สเต็ปเปอร์ที่มีอยู่”
ไม่ควรใช้โหมดการขับขี่แบบเต็มขั้นในการขับเคลื่อนมอเตอร์สเต็ปปิ้งแบบไฮบริด เนื่องจากจะทำให้เกิดการสั่นสะเทือนมากขึ้นเมื่อขับขี่แบบเต็มขั้น
มอเตอร์สเต็ปเปอร์แบบไฮบริดเหมาะสำหรับงานที่ต้องการความเร็วต่ำ เราแนะนำว่าความเร็วไม่ควรเกิน 1000 รอบต่อนาที (6666 PPS ที่ 0.9 องศา) โดยควรอยู่ระหว่าง 1000-3000 PPS (0.9 องศา) และสามารถต่อกับเกียร์ทดรอบเพื่อลดความเร็วได้ มอเตอร์ชนิดนี้มีประสิทธิภาพการทำงานสูงและเสียงรบกวนต่ำที่ความถี่ที่เหมาะสม
เนื่องจากเหตุผลทางประวัติศาสตร์ มอเตอร์ที่มีแรงดันไฟฟ้าระบุ 12V เท่านั้นที่จะใช้แรงดันไฟฟ้า 12V แรงดันไฟฟ้าอื่นๆ ที่ระบุไว้ในแบบร่างอาจไม่ใช่แรงดันไฟฟ้าที่เหมาะสมที่สุดสำหรับมอเตอร์ ลูกค้าควรเลือกแรงดันไฟฟ้าและตัวขับมอเตอร์ที่เหมาะสมตามความต้องการของตนเอง
เมื่อใช้งานมอเตอร์ด้วยความเร็วสูงหรือรับภาระมาก โดยทั่วไปแล้วมอเตอร์จะไม่เริ่มทำงานที่ความเร็วปกติโดยตรง เราแนะนำให้ค่อยๆ เพิ่มความถี่และความเร็วทีละน้อย ด้วยเหตุผลสองประการ คือ ประการแรก มอเตอร์จะไม่สูญเสียขั้นตอน และประการที่สอง จะช่วยลดเสียงรบกวนและปรับปรุงความแม่นยำในการกำหนดตำแหน่ง
มอเตอร์ไม่ควรทำงานในช่วงที่มีการสั่นสะเทือนสูง (ต่ำกว่า 600 รอบต่อวินาที) หากจำเป็นต้องใช้งานที่ความเร็วต่ำ ปัญหาการสั่นสะเทือนสามารถลดลงได้โดยการเปลี่ยนแรงดัน กระแส หรือเพิ่มวัสดุลดแรงสั่นสะเทือน
เมื่อมอเตอร์ทำงานที่ความเร็วรอบต่ำกว่า 600 PPS (0.9 องศา) ควรใช้กระแสไฟฟ้าน้อย ค่าเหนี่ยวนำสูง และแรงดันไฟฟ้าต่ำในการขับเคลื่อน
สำหรับอุปกรณ์ที่มีโมเมนต์ความเฉื่อยสูง ควรเลือกใช้มอเตอร์ขนาดใหญ่
เมื่อต้องการความแม่นยำสูงขึ้น สามารถแก้ไขได้โดยการเพิ่มเกียร์ เพิ่มความเร็วของมอเตอร์ หรือใช้การขับแบบแบ่งย่อย นอกจากนี้ยังสามารถใช้มอเตอร์ 5 เฟส (มอเตอร์ขั้วเดียว) ได้ แต่ราคาของระบบทั้งหมดค่อนข้างสูง จึงไม่ค่อยได้ใช้กัน
ขนาดของมอเตอร์สเต็ปเปอร์:
ขณะนี้เรามีมอเตอร์สเต็ปเปอร์แบบไฮบริดขนาด 20 มม. (NEMA8), 28 มม. (NEMA11), 35 มม. (NEMA14), 42 มม. (NEMA17), 57 มม. (NEMA23) และ 86 มม. (NEMA34) เราแนะนำให้ตรวจสอบขนาดมอเตอร์ก่อน จากนั้นจึงตรวจสอบพารามิเตอร์อื่นๆ เมื่อเลือกมอเตอร์สเต็ปเปอร์แบบไฮบริด
บริการปรับแต่ง
การออกแบบมอเตอร์สามารถปรับเปลี่ยนได้ตามความต้องการของลูกค้า ซึ่งรวมถึง:
ขนาดเส้นผ่านศูนย์กลางของมอเตอร์: เรามีมอเตอร์ขนาดเส้นผ่านศูนย์กลาง 6 มม., 8 มม., 10 มม., 15 มม. และ 20 มม.
ค่าความต้านทานของขดลวด/แรงดันไฟฟ้าที่กำหนด: ค่าความต้านทานของขดลวดสามารถปรับได้ และยิ่งค่าความต้านทานสูง แรงดันไฟฟ้าที่กำหนดของมอเตอร์ก็จะยิ่งสูงขึ้น
การออกแบบโครงยึด/ความยาวสกรูนำ: หากลูกค้าต้องการให้โครงยึดมีความยาวหรือสั้นกว่าปกติ สามารถปรับแต่งได้ด้วยการออกแบบพิเศษ เช่น รูยึด
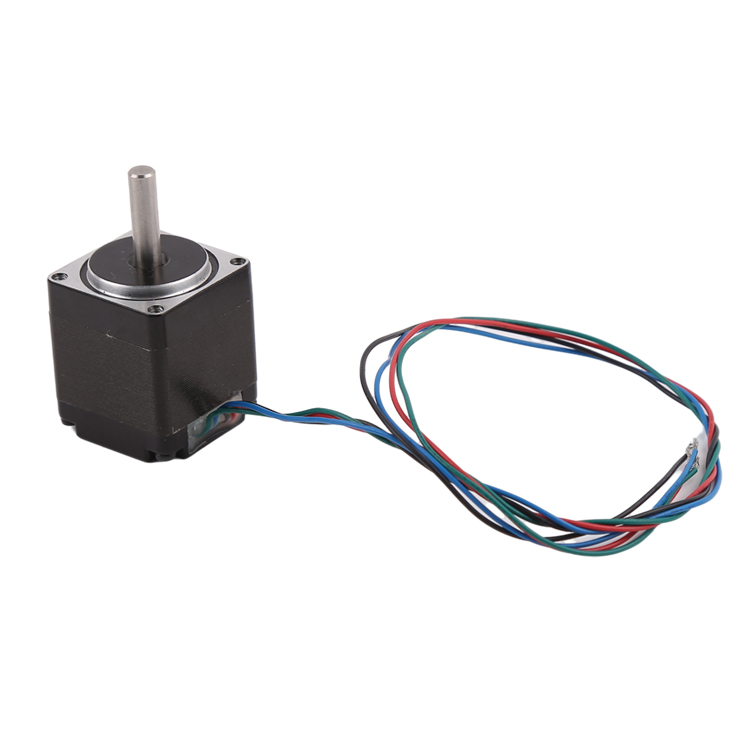
แผงวงจรพิมพ์ (PCB) + สายเคเบิล + ขั้วต่อ: การออกแบบ PCB ความยาวสายเคเบิล และระยะห่างของขั้วต่อสามารถปรับได้ และสามารถเปลี่ยนเป็น FPC ได้หากลูกค้าต้องการ
ระยะเวลานำส่ง
หากเรามีสินค้าตัวอย่างในสต็อก เราสามารถจัดส่งตัวอย่างได้ภายใน 3 วัน
หากเราไม่มีสินค้าตัวอย่างในสต็อก เราจำเป็นต้องผลิตขึ้นมาใหม่ ซึ่งใช้เวลาในการผลิตประมาณ 20 วันทำการ
สำหรับการผลิตจำนวนมาก ระยะเวลานำส่งขึ้นอยู่กับปริมาณการสั่งซื้อ
วิธีการชำระเงินและเงื่อนไขการชำระเงิน
โดยทั่วไปแล้ว สำหรับการส่งตัวอย่างสินค้า เรารับชำระเงินผ่าน PayPal หรือ Alibaba
สำหรับการผลิตจำนวนมาก เรารับชำระเงินผ่านการโอนเงินทางธนาคาร (T/T)
สำหรับการส่งตัวอย่างสินค้า เราจะเรียกเก็บเงินเต็มจำนวนก่อนเริ่มการผลิต
สำหรับการผลิตจำนวนมาก เราสามารถรับชำระเงินล่วงหน้า 50% ก่อนการผลิต และเรียกเก็บเงินส่วนที่เหลือ 50% ก่อนการจัดส่ง
หลังจากที่เราร่วมมือกันสั่งซื้อสินค้ามากกว่า 6 ครั้ง เราสามารถเจรจาเงื่อนไขการชำระเงินอื่นๆ ได้ เช่น การชำระเงินเมื่อเห็นเอกสาร (A/S - After Sight)
คำถามที่พบบ่อย
1. ระยะเวลาในการจัดส่งตัวอย่างโดยทั่วไปนานเท่าไหร่? ระยะเวลาในการจัดส่งสำหรับการสั่งซื้อจำนวนมากในขั้นตอนสุดท้ายนานเท่าไหร่?
ระยะเวลาในการจัดส่งตัวอย่างประมาณ 15 วัน ระยะเวลาในการจัดส่งสำหรับการสั่งซื้อจำนวนมากคือ 25-30 วัน
2. คุณรับบริการตามสั่งหรือไม่?
เรายินดีรับผลิตสินค้าตามสั่ง รวมถึงพารามิเตอร์ของมอเตอร์ ประเภทสายไฟ เพลาส่งกำลัง ฯลฯ
3. สามารถติดตั้งตัวเข้ารหัส (encoder) เข้ากับมอเตอร์นี้ได้หรือไม่?
สำหรับมอเตอร์ประเภทนี้ เราสามารถเพิ่มตัวเข้ารหัส (encoder) เข้าไปในฝาครอบกันสึกของมอเตอร์ได้
คำถามที่พบบ่อย
1. วิธีลดความร้อนของมอเตอร์สเต็ปเปอร์:
การลดการเกิดความร้อนคือการลดการสูญเสียทองแดงและการสูญเสียเหล็ก การลดการสูญเสียทองแดงทำได้สองทาง คือลดทั้งความต้านทานและกระแส ซึ่งต้องเลือกมอเตอร์ที่มีความต้านทานต่ำและกระแสพิกัดต่ำที่สุดเท่าที่จะเป็นไปได้ มอเตอร์สองเฟสสามารถใช้มอเตอร์แบบอนุกรมได้โดยไม่ต้องใช้มอเตอร์แบบขนาน แต่สิ่งนี้มักขัดแย้งกับข้อกำหนดของแรงบิดและความเร็วสูง สำหรับมอเตอร์ที่เลือก ควรใช้ฟังก์ชันควบคุมกระแสครึ่งหนึ่งอัตโนมัติและฟังก์ชันออฟไลน์ของไดรฟ์ให้เต็มที่ ฟังก์ชันแรกจะลดกระแสโดยอัตโนมัติเมื่อมอเตอร์หยุดทำงาน และฟังก์ชันหลังจะตัดกระแสออก นอกจากนี้ การใช้ไดรฟ์แบบแบ่งย่อย เนื่องจากรูปคลื่นกระแสใกล้เคียงกับคลื่นไซน์ มีฮาร์โมนิกน้อยลง ความร้อนของมอเตอร์ก็จะน้อยลงด้วย มีหลายวิธีในการลดการสูญเสียเหล็ก และระดับแรงดันไฟฟ้าก็เกี่ยวข้องกับเรื่องนี้ แม้ว่ามอเตอร์ที่ขับเคลื่อนด้วยแรงดันไฟฟ้าสูงจะทำให้คุณลักษณะความเร็วสูงเพิ่มขึ้น แต่ก็ทำให้การเกิดความร้อนเพิ่มขึ้นด้วย ดังนั้นเราควรเลือกแรงดันไฟฟ้าของไดรฟ์ที่เหมาะสม โดยคำนึงถึงความเร็วสูง ความราบรื่น ความร้อน เสียงรบกวน และตัวชี้วัดอื่นๆ
ส่งข้อความของคุณมาถึงเรา:
หมวดหมู่สินค้า
-
มอเตอร์สเต็ปเปอร์ไฮบริดเชิงเส้น NEMA8 ขนาด 20 มม. พร้อมฟังก์ชั่นรัน...
-

มอเตอร์สเต็ปเปอร์ไฮบริด NEMA11 ขนาด 28 มม. หมุนได้ 1.8 องศา...
-
มอเตอร์สเต็ปเปอร์ไฮบริดเชิงเส้น NEMA11 ขนาด 28 มม. แบบไม่มีตัวเก็บประจุ...
-

มอเตอร์สเต็ปเปอร์แบบเกียร์ดาวเคราะห์ 35 มม. (NEMA 14) ...
-

ขั้วต่อไฮบริด 2 เฟส 4 สาย ขนาด 14 มม. ความแม่นยำสูง NEMA 6...
-

มอเตอร์สเต็ปเปอร์ความแม่นยำสูง 42 มม. NEMA 17 แบบไฮบริด...