


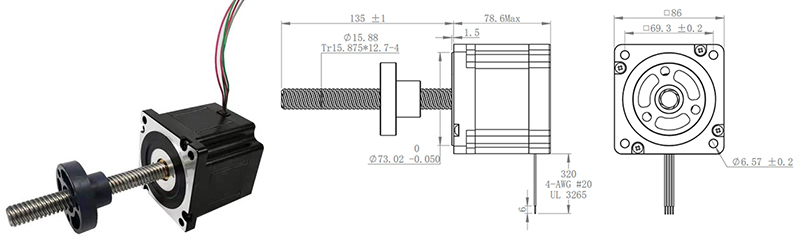
มอเตอร์สเต็ปเปอร์ไฮบริด NEMA 23 แรงบิดสูง เส้นผ่านศูนย์กลางมอเตอร์ 57 มม.
คำอธิบาย
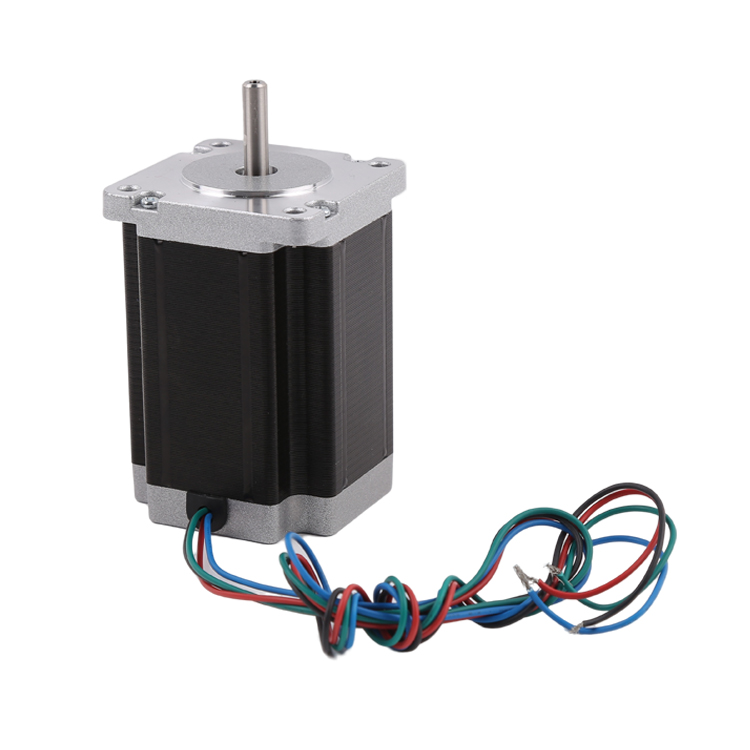
นี่คือมอเตอร์สเต็ปเปอร์ไฮบริด NEMA 23 ขนาดเส้นผ่านศูนย์กลาง 57 มม.
ลูกค้าสามารถเลือกมุมเอียงของขั้นบันไดได้ 2 ระดับ คือ 1.8 องศา และ 0.9 องศา
ความสูงของมอเตอร์มีให้เลือก 41 มม., 51 มม., 56 มม., 76 มม., 100 มม., 112 มม.
น้ำหนักและแรงบิดของมอเตอร์มีความสัมพันธ์กับความสูงของมอเตอร์
เพลาส่งกำลังมาตรฐานของมอเตอร์คือเพลา D ซึ่งสามารถเปลี่ยนไปใช้เพลาเกลียวรูปสี่เหลี่ยมคางหมูได้เช่นกัน
ลูกค้าสามารถเลือกพารามิเตอร์ด้านล่างตามความต้องการได้ โปรดติดต่อเราหากมีข้อสงสัยเกี่ยวกับมอเตอร์ เราพร้อมให้การสนับสนุนอย่างมืออาชีพเพิ่มเติม
พารามิเตอร์
| มุมขั้นบันได (°) | ความยาวของมอเตอร์ (มม.) | แรงบิดยึด (กรัม*ซม.) | ปัจจุบัน /เฟส (เฟส A) |
ความต้านทาน (Ω/เฟส) | ความเหนี่ยวนำ (มิลลิเฮนรี/เฟส) | จำนวน ผู้นำ | ความเฉื่อยในการหมุน (กรัม*ซม.)2) | น้ำหนัก (กก.) |
| 0.9 | 41 | 3.9 | 1 | 5.7 | 0.7 | 6 | 120 | 0.45 |
| 1.8 | 41 | 3.9 | 2 | 1.4 | 1.4 | 8 | 150 | 0.47 |
| 0.9 | 51 | 7.2 | 2 | 1.6 | 2.2 | 6 | 280 | 0.59 |
| 1.8 | 51 | 3009 | 2 | 1.8 | 2.7 | 8 | 230 | 0.59 |
| 0.9 | 56 | 12 | 2.8 | 0.9 | 3.3 | 4 | 300 | 0.7 |
| 1.8 | 56 | 9 | 2 | 1.8 | 2.5 | 6 | 280 | 0.68 |
| 0.9 | 76 | 18 | 2.8 | 1.15 | 5.6 | 4 | 480 | 1 |
| 1.8 | 76 | 13.5 | 3 | 1 | 1.6 | 6 | 440 | 1.1 |
| 1.8 | 100 | 30 | 4.2 | 0.75 | 3 | 4 | 700 | 1.3 |
| 1.8 | 112 | 31 | 4.2 | 0.9 | 3.8 | 4 | 800 | 1.4 |
พารามิเตอร์ข้างต้นเป็นข้อมูลอ้างอิงมาตรฐานของผลิตภัณฑ์ มอเตอร์สามารถปรับแต่งได้ตามความต้องการของลูกค้า
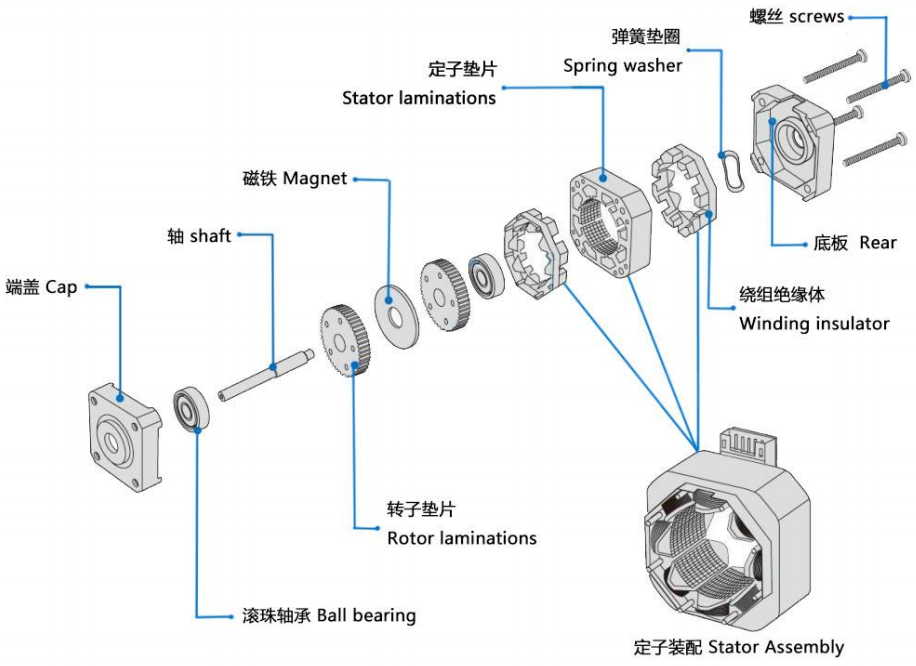
แบบร่างการออกแบบ
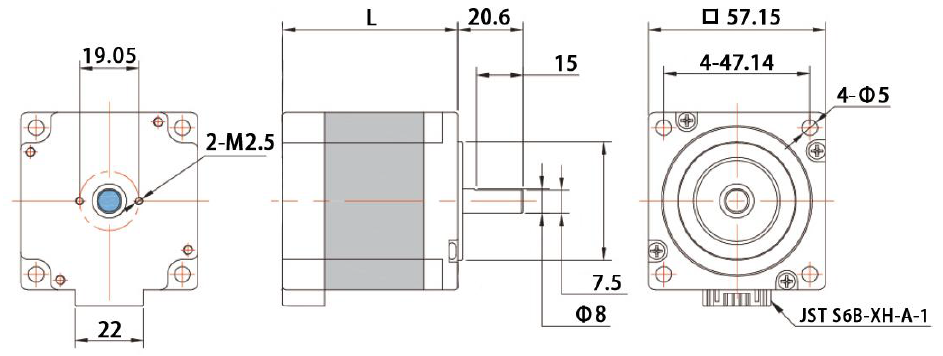
โครงสร้างพื้นฐานของมอเตอร์สเต็ปเปอร์ NEMA
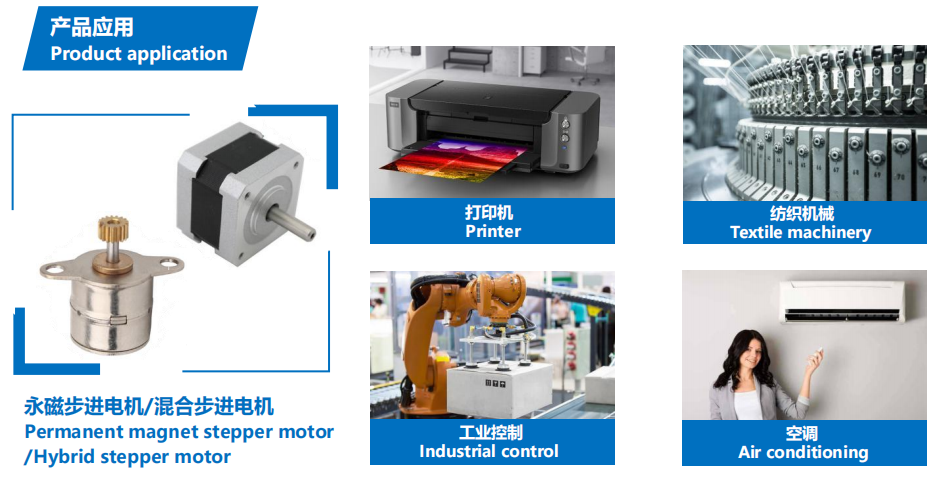
การประยุกต์ใช้มอเตอร์สเต็ปเปอร์แบบไฮบริด
เนื่องจากมอเตอร์สเต็ปเปอร์แบบไฮบริดมีความละเอียดสูง (200 หรือ 400 สเต็ปต่อรอบ) จึงมีการใช้งานอย่างแพร่หลายในงานที่ต้องการความแม่นยำสูง เช่น:
การพิมพ์ 3 มิติ
ระบบควบคุมอุตสาหกรรม (เครื่อง CNC, เครื่องกัดอัตโนมัติ, เครื่องจักรสิ่งทอ)
อุปกรณ์ต่อพ่วงคอมพิวเตอร์
เครื่องบรรจุภัณฑ์
และระบบอัตโนมัติอื่นๆ ที่ต้องการการควบคุมที่มีความแม่นยำสูง
หมายเหตุการใช้งานเกี่ยวกับมอเตอร์สเต็ปเปอร์แบบไฮบริด
ลูกค้าควรยึดหลักการ “เลือกมอเตอร์สเต็ปเปอร์ก่อน จากนั้นจึงเลือกไดรเวอร์โดยพิจารณาจากมอเตอร์สเต็ปเปอร์ที่มีอยู่”
ไม่ควรใช้โหมดการขับขี่แบบเต็มขั้นในการขับเคลื่อนมอเตอร์สเต็ปปิ้งแบบไฮบริด เนื่องจากจะทำให้เกิดการสั่นสะเทือนมากขึ้นเมื่อขับขี่แบบเต็มขั้น
มอเตอร์สเต็ปเปอร์แบบไฮบริดเหมาะสำหรับงานที่ต้องการความเร็วต่ำ เราแนะนำว่าความเร็วไม่ควรเกิน 1000 รอบต่อนาที (6666 PPS ที่ 0.9 องศา) โดยควรอยู่ระหว่าง 1000-3000 PPS (0.9 องศา) และสามารถต่อกับเกียร์ทดรอบเพื่อลดความเร็วได้ มอเตอร์ชนิดนี้มีประสิทธิภาพการทำงานสูงและเสียงรบกวนต่ำที่ความถี่ที่เหมาะสม
เนื่องจากเหตุผลทางประวัติศาสตร์ มอเตอร์ที่มีแรงดันไฟฟ้าระบุ 12V เท่านั้นที่จะใช้แรงดันไฟฟ้า 12V แรงดันไฟฟ้าอื่นๆ ที่ระบุไว้ในแบบร่างอาจไม่ใช่แรงดันไฟฟ้าที่เหมาะสมที่สุดสำหรับมอเตอร์ ลูกค้าควรเลือกแรงดันไฟฟ้าและตัวขับมอเตอร์ที่เหมาะสมตามความต้องการของตนเอง
เมื่อใช้งานมอเตอร์ด้วยความเร็วสูงหรือรับภาระมาก โดยทั่วไปแล้วมอเตอร์จะไม่เริ่มทำงานที่ความเร็วปกติโดยตรง เราแนะนำให้ค่อยๆ เพิ่มความถี่และความเร็วทีละน้อย ด้วยเหตุผลสองประการ คือ ประการแรก มอเตอร์จะไม่สูญเสียขั้นตอน และประการที่สอง จะช่วยลดเสียงรบกวนและปรับปรุงความแม่นยำในการกำหนดตำแหน่ง
มอเตอร์ไม่ควรทำงานในช่วงที่มีการสั่นสะเทือนสูง (ต่ำกว่า 600 รอบต่อวินาที) หากจำเป็นต้องใช้งานที่ความเร็วต่ำ ปัญหาการสั่นสะเทือนสามารถลดลงได้โดยการเปลี่ยนแรงดัน กระแส หรือเพิ่มวัสดุลดแรงสั่นสะเทือน
เมื่อมอเตอร์ทำงานที่ความเร็วรอบต่ำกว่า 600 PPS (0.9 องศา) ควรใช้กระแสไฟฟ้าน้อย ค่าเหนี่ยวนำสูง และแรงดันไฟฟ้าต่ำในการขับเคลื่อน
สำหรับอุปกรณ์ที่มีโมเมนต์ความเฉื่อยสูง ควรเลือกใช้มอเตอร์ขนาดใหญ่
เมื่อต้องการความแม่นยำสูงขึ้น สามารถแก้ไขได้โดยการเพิ่มเกียร์ เพิ่มความเร็วของมอเตอร์ หรือใช้การขับแบบแบ่งย่อย นอกจากนี้ยังสามารถใช้มอเตอร์ 5 เฟส (มอเตอร์ขั้วเดียว) ได้ แต่ราคาของระบบทั้งหมดค่อนข้างสูง จึงไม่ค่อยได้ใช้กัน
ขนาดของมอเตอร์สเต็ปเปอร์:
ขณะนี้เรามีมอเตอร์สเต็ปเปอร์แบบไฮบริดขนาด 20 มม. (NEMA8), 28 มม. (NEMA11), 35 มม. (NEMA14), 42 มม. (NEMA17), 57 มม. (NEMA23) และ 86 มม. (NEMA34) เราแนะนำให้ตรวจสอบขนาดมอเตอร์ก่อน จากนั้นจึงตรวจสอบพารามิเตอร์อื่นๆ เมื่อเลือกมอเตอร์สเต็ปเปอร์แบบไฮบริด
บริการปรับแต่ง
การออกแบบมอเตอร์สามารถปรับเปลี่ยนได้ตามความต้องการของลูกค้า ซึ่งรวมถึง:
ขนาดเส้นผ่านศูนย์กลางของมอเตอร์: เรามีมอเตอร์ขนาดเส้นผ่านศูนย์กลาง 6 มม., 8 มม., 10 มม., 15 มม. และ 20 มม.
ค่าความต้านทานของขดลวด/แรงดันไฟฟ้าที่กำหนด: ค่าความต้านทานของขดลวดสามารถปรับได้ และยิ่งค่าความต้านทานสูง แรงดันไฟฟ้าที่กำหนดของมอเตอร์ก็จะยิ่งสูงขึ้น
การออกแบบโครงยึด/ความยาวสกรูนำ: หากลูกค้าต้องการให้โครงยึดมีความยาวหรือสั้นกว่าปกติ สามารถปรับแต่งได้ด้วยการออกแบบพิเศษ เช่น รูยึด
แผงวงจรพิมพ์ (PCB) + สายเคเบิล + ขั้วต่อ: การออกแบบ PCB ความยาวสายเคเบิล และระยะห่างของขั้วต่อสามารถปรับได้ และสามารถเปลี่ยนเป็น FPC ได้หากลูกค้าต้องการ
ระยะเวลานำส่ง
หากเรามีสินค้าตัวอย่างในสต็อก เราสามารถจัดส่งตัวอย่างได้ภายใน 3 วัน
หากเราไม่มีสินค้าตัวอย่างในสต็อก เราจำเป็นต้องผลิตขึ้นมาใหม่ ซึ่งใช้เวลาในการผลิตประมาณ 20 วันทำการ
สำหรับการผลิตจำนวนมาก ระยะเวลานำส่งขึ้นอยู่กับปริมาณการสั่งซื้อ
วิธีการชำระเงินและเงื่อนไขการชำระเงิน
โดยทั่วไปแล้ว สำหรับการส่งตัวอย่างสินค้า เรารับชำระเงินผ่าน PayPal หรือ Alibaba
สำหรับการผลิตจำนวนมาก เรารับชำระเงินผ่านการโอนเงินทางธนาคาร (T/T)
สำหรับการส่งตัวอย่างสินค้า เราจะเรียกเก็บเงินเต็มจำนวนก่อนเริ่มการผลิต
สำหรับการผลิตจำนวนมาก เราสามารถรับชำระเงินล่วงหน้า 50% ก่อนการผลิต และเรียกเก็บเงินส่วนที่เหลือ 50% ก่อนการจัดส่ง
หลังจากที่เราร่วมมือกันสั่งซื้อสินค้ามากกว่า 6 ครั้ง เราสามารถเจรจาเงื่อนไขการชำระเงินอื่นๆ ได้ เช่น การชำระเงินเมื่อเห็นเอกสาร (A/S - After Sight)
คำถามที่พบบ่อย
1. ระยะเวลาในการจัดส่งตัวอย่างโดยทั่วไปนานเท่าไหร่? ระยะเวลาในการจัดส่งสำหรับการสั่งซื้อจำนวนมากในขั้นตอนสุดท้ายนานเท่าไหร่?
ระยะเวลาในการจัดส่งตัวอย่างประมาณ 15 วัน ระยะเวลาในการจัดส่งสำหรับการสั่งซื้อจำนวนมากคือ 25-30 วัน
2. คุณรับบริการตามสั่งหรือไม่?
เรายินดีรับผลิตสินค้าตามสั่ง รวมถึงพารามิเตอร์ของมอเตอร์ ประเภทสายไฟ เพลาส่งกำลัง ฯลฯ
3. สามารถติดตั้งตัวเข้ารหัส (encoder) เข้ากับมอเตอร์นี้ได้หรือไม่?
สำหรับมอเตอร์ประเภทนี้ เราสามารถเพิ่มตัวเข้ารหัส (encoder) เข้าไปในฝาครอบกันสึกของมอเตอร์ได้
คำถามที่พบบ่อย
1. สาเหตุและวิธีแก้ไขปัญหาภาระที่เพิ่มขึ้นของมอเตอร์สเต็ปเปอร์หลังจากการใช้งานระยะยาว
สาเหตุ: ในบางกรณี มอเตอร์สเต็ปเปอร์อาจทำงานได้ปกติเป็นเวลานาน แต่หลังจากนั้นระยะหนึ่งจะเริ่มสูญเสียจำนวนสเต็ป ในกรณีนี้ ภาระที่กระทำต่อมอเตอร์สเต็ปเปอร์อาจมีการเปลี่ยนแปลง ซึ่งอาจเกิดจากการสึกหรอของลูกปืนมอเตอร์สเต็ปเปอร์หรือจากอิทธิพลภายนอก
สารละลาย.
①ตรวจสอบว่าสภาพแวดล้อมภายนอกไม่ได้เปลี่ยนแปลง: กลไกการขับเคลื่อนมอเตอร์มีการเปลี่ยนแปลงหรือไม่
②ตรวจสอบการสึกหรอของตลับลูกปืน: ควรใช้ตลับลูกปืนแบบธรรมดาแทนบูชเพื่อยืดอายุการใช้งานของมอเตอร์
③ตรวจสอบว่าอุณหภูมิแวดล้อมไม่เปลี่ยนแปลง สำหรับมอเตอร์ขนาดเล็ก ความหนืดของจาระบีแบริ่งนั้นมีผลอย่างมาก ควรใช้จาระบีที่เหมาะสมกับช่วงการทำงาน (เช่น จาระบีอาจมีความหนืดสูงขึ้นในอุณหภูมิที่สูงเกินไป หรือเมื่อใช้งานเป็นเวลานาน ซึ่งจะทำให้มอเตอร์รับภาระมากขึ้น)
2. สาเหตุของการเกิดความร้อนในมอเตอร์สเต็ปเปอร์
①กระแสไฟฟ้าที่ตัวขับตั้งค่าไว้นั้นมากกว่ากระแสไฟฟ้าพิกัดของมอเตอร์
②ความเร็วของมอเตอร์เร็วเกินไป
③มอเตอร์เองมีแรงเฉื่อยและแรงบิดในการกำหนดตำแหน่งสูง ดังนั้นแม้การทำงานที่ความเร็วปานกลางก็อาจทำให้เกิดความร้อนได้ แต่ก็ไม่ส่งผลกระทบต่ออายุการใช้งานของมอเตอร์ จุดลดอำนาจแม่เหล็กของมอเตอร์อยู่ที่ 130-200 ℃ ดังนั้นมอเตอร์ที่อุณหภูมิ 70-90 ℃ จึงเป็นเรื่องปกติ ตราบใดที่ต่ำกว่า 130 ℃ โดยทั่วไปก็ไม่มีปัญหา หากคุณรู้สึกว่าร้อนเกินไปจริงๆ ให้ตั้งกระแสขับไว้ที่ประมาณ 70% ของกระแสมอเตอร์ที่กำหนด หรือลดความเร็วของมอเตอร์ลงบ้าง
3. เมื่อเปิดมอเตอร์สเต็ปเปอร์แล้ว แกนมอเตอร์ไม่หมุน ต้องทำอย่างไร?
มีหลายสาเหตุที่ทำให้มอเตอร์ไม่หมุน:
ก. การหมุนที่ถูกบล็อกจากการโอเวอร์โหลด
ข. มอเตอร์ได้รับความเสียหายหรือไม่
ค. ตรวจสอบว่ามอเตอร์หยุดทำงานหรือไม่
D.สัญญาณชีพจร CP เป็นศูนย์หรือไม่
ส่งข้อความของคุณมาถึงเรา:
หมวดหมู่สินค้า
-

มอเตอร์สเต็ปเปอร์ไฮบริดเชิงเส้น NEMA34 ขนาด 86 มม. (ภายนอก)...
-

มอเตอร์สเต็ปเปอร์ไฮบริด NEMA11 ขนาด 28 มม. หมุนได้ 1.8 องศา...
-

มอเตอร์สเต็ปเปอร์ไฮบริด NEMA8 ขนาด 20 มม. หมุนได้ 1.8 องศา...
-

มอเตอร์สเต็ปเปอร์แบบเกียร์ดาวเคราะห์ 35 มม. (NEMA 14) ...
-

ขั้วต่อไฮบริด 2 เฟส 4 สาย ขนาด 14 มม. ความแม่นยำสูง NEMA 6...
-

มอเตอร์สเต็ปเปอร์ความแม่นยำสูง 42 มม. NEMA 17 แบบไฮบริด...