




มอเตอร์สเต็ปเปอร์แบบเกียร์ดาวเคราะห์ความแม่นยำสูง 35 มม. NEMA 14
คำอธิบาย
นี่คือสเต็ปเปอร์มอเตอร์แบบเกียร์ทดรอบดาวเคราะห์ที่มีความแม่นยำสูง ซึ่งประกอบขึ้นจากสเต็ปเปอร์มอเตอร์แบบไฮบริดทรงสี่เหลี่ยมขนาด 35 มม. (NEMA14) และเกียร์ทดรอบดาวเคราะห์ทรงกระบอกหลายตัว
โดยทั่วไปมอเตอร์สำหรับผลิตภัณฑ์นี้มีความยาวตั้งแต่ 32.4 ถึง 56.7 มม. และสามารถสั่งทำความยาวพิเศษได้ ยิ่งความยาวมากเท่าไหร่ แรงบิดของมอเตอร์ก็จะยิ่งสูงขึ้นเท่านั้น
นอกจากนี้ ยังมีตัวเลือกสองแบบสำหรับมุมการหมุนของมอเตอร์ คือ 0.9 องศา และ 1.8 องศา โดยมุมการหมุน 1.8 องศาเป็นมุมที่นิยมใช้มากกว่า
ชุดเกียร์ทดรอบมีให้เลือกหลายอัตราทดความเร็ว ตั้งแต่ 3.71 ถึง 3729.5 ชุดเกียร์ทดรอบที่มีอัตราทดความเร็วต่างกันจะมีจำนวนขั้นเกียร์และแน่นอนว่าความยาวก็ต่างกันด้วย ยิ่งความยาวมากเท่าไหร่ ประสิทธิภาพก็จะยิ่งต่ำลงเท่านั้น
เนื่องจากประสิทธิภาพในการส่งแรงบิดจะแปรผันตามจำนวนขั้นเกียร์ในชุดเกียร์ ดังนั้นปัจจัยหลัก เช่น พื้นที่ในการประกอบ ความเร็วและแรงบิดที่ต้องการ ควรนำมาพิจารณาก่อนเป็นอันดับแรกเมื่อเลือกมอเตอร์และชุดเกียร์ เมื่อมอเตอร์ตรงตามข้อกำหนดทั้งหมดเหล่านี้แล้ว ก็สามารถกำหนดขนาดเบื้องต้นได้ จากนั้นจึงพิจารณารายละเอียดเฉพาะ เช่น การเชื่อมต่อทางออกและรูปทรงของเพลาส่งกำลัง
หากคุณสนใจผลิตภัณฑ์ของเรา โปรดส่งอีเมลมาหาฉัน

พารามิเตอร์
| ระดับเกียร์ | ประสิทธิภาพ | ความยาวของเกียร์ | อัตราทดเกียร์เสริม |
| 1 | 90% | 32.4 | 3.71:1, 5.181:1 |
| 2 | 80% | 37.2 | 13.761:1, 19.221:1, 26.831:1 |
| 3 | 72% | 43.5 | 51:1, 71.30:1, 99.55:1, 138.99:1 |
| 4 | 65% | 50.4 | 189.45:1,264.52:1,369.32:1,515.66:1,719.98:1 |
| 5 | 58% | 56.7 | 981.35:1, 1370.2:1, 1913.1:1, 2671:1, 3729.5:1 |
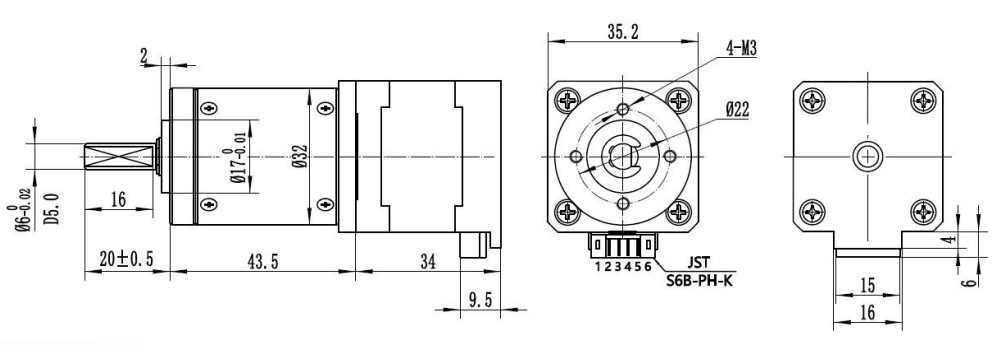
แบบร่างการออกแบบ
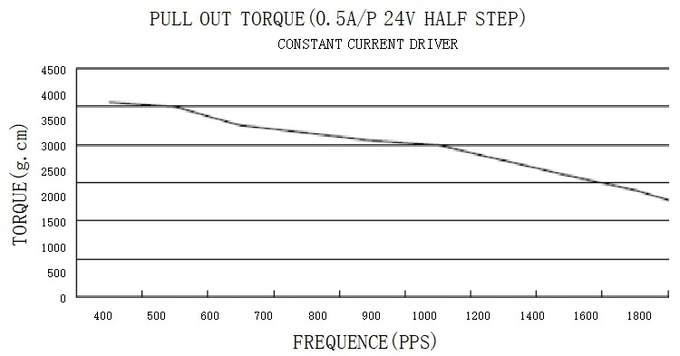
แรงบิดของมอเตอร์เทียบกับความเร็วในการขับขี่ (pps)
เกี่ยวกับมอเตอร์สเต็ปเปอร์ไฮบริด
มอเตอร์สเต็ปเปอร์แบบไฮบริดโดยทั่วไปจะมีรูปทรงสี่เหลี่ยมจัตุรัส และสามารถระบุตัวมอเตอร์สเต็ปเปอร์ได้จากรูปทรงภายนอกที่เป็นเอกลักษณ์
มอเตอร์สเต็ปเปอร์แบบไฮบริดมีมุมก้าว 1.8° (200 ก้าว/รอบ) หรือ 0.9° (400 ก้าว/รอบ) มุมก้าวจะถูกกำหนดโดยจำนวนฟันบนแผ่นลามิเนตของโรเตอร์
มีสองวิธีในการตั้งชื่อมอเตอร์สเต็ปเปอร์แบบไฮบริด
โดยหน่วยเมตริก (หน่วย: มม.) หรือโดยหน่วยอิมพีเรียล (หน่วย: นิ้ว)
ตัวอย่างเช่น มอเตอร์ขนาด 42 มม. เท่ากับมอเตอร์สเต็ปเปอร์ขนาด 1.7 นิ้ว
ดังนั้น มอเตอร์ขนาด 42 มม. จึงอาจเรียกได้ว่าเป็นมอเตอร์ NEMA 17 เช่นกัน
คำอธิบายเกี่ยวกับที่มาของชื่อมอเตอร์สเต็ปเปอร์ไฮบริด
ตัวอย่างเช่น มอเตอร์สเต็ปเปอร์ 42HS40:
เลข 42 หมายถึงขนาด 42 มม. ดังนั้นจึงเป็นมอเตอร์ NEMA17
HS ย่อมาจาก Hybrid Stepper motor (มอเตอร์สเต็ปเปอร์แบบไฮบริด)
40 หมายถึงมอเตอร์มีความสูง 40 มม.
เรามีมอเตอร์หลายความสูงให้ลูกค้าเลือก โดยมอเตอร์ที่มีความสูงมากขึ้นจะมีแรงบิดสูงขึ้น น้ำหนักมากขึ้น และราคาสูงขึ้นตามไปด้วย
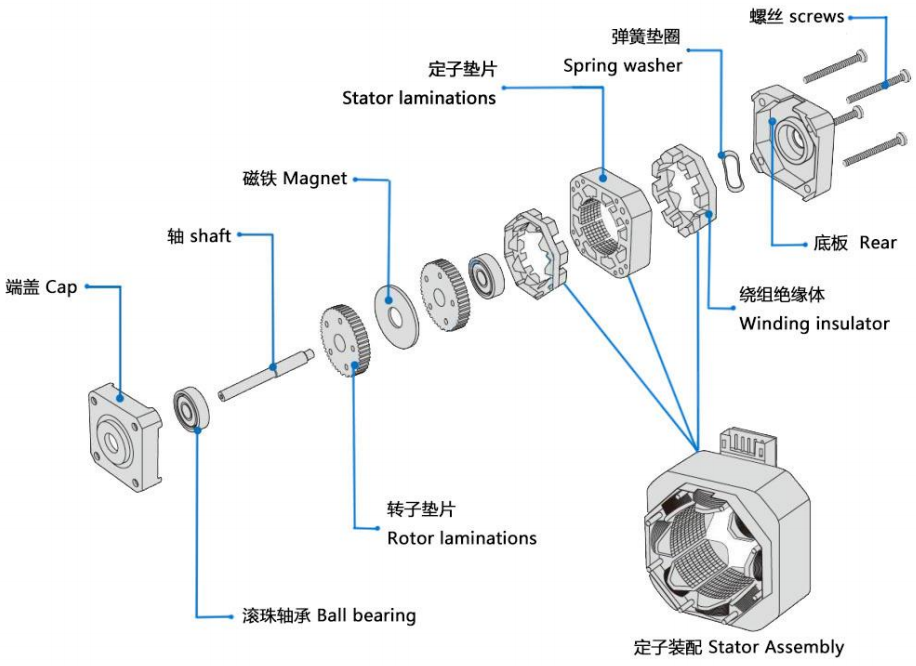
นี่คือโครงสร้างภายในของมอเตอร์สเต็ปเปอร์ไฮบริดทั่วไป
โครงสร้างพื้นฐานของมอเตอร์สเต็ปเปอร์ NEMA
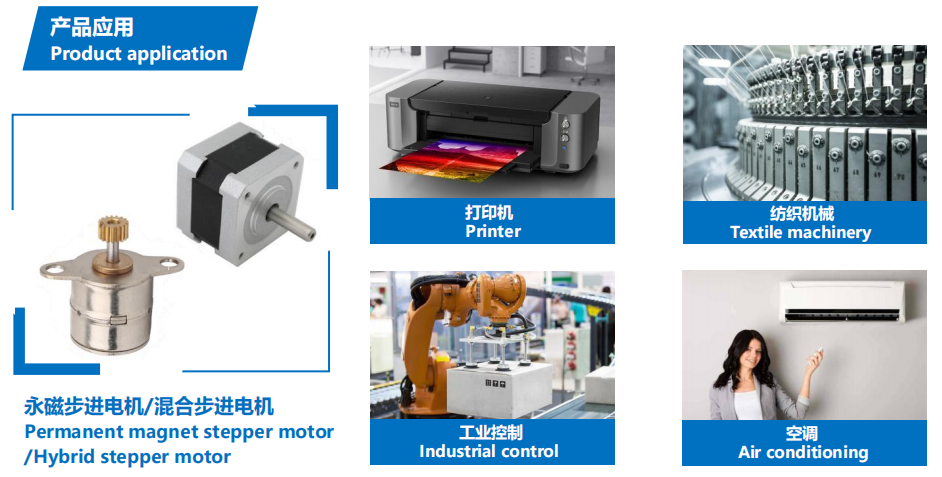
การประยุกต์ใช้มอเตอร์สเต็ปเปอร์แบบไฮบริด
เนื่องจากมอเตอร์สเต็ปเปอร์แบบไฮบริดมีความละเอียดสูง (200 หรือ 400 สเต็ปต่อรอบ) จึงมีการใช้งานอย่างแพร่หลายในงานที่ต้องการความแม่นยำสูง เช่น:
การพิมพ์ 3 มิติ
ระบบควบคุมอุตสาหกรรม (เครื่อง CNC, เครื่องกัดอัตโนมัติ, เครื่องจักรสิ่งทอ)
อุปกรณ์ต่อพ่วงคอมพิวเตอร์
เครื่องบรรจุภัณฑ์
และระบบอัตโนมัติอื่นๆ ที่ต้องการการควบคุมที่มีความแม่นยำสูง
หมายเหตุเกี่ยวกับมอเตอร์สเต็ปเปอร์แบบไฮบริด
ลูกค้าควรยึดหลักการ “เลือกมอเตอร์สเต็ปเปอร์ก่อน จากนั้นจึงเลือกไดรเวอร์โดยพิจารณาจากมอเตอร์สเต็ปเปอร์ที่มีอยู่”
ไม่ควรใช้โหมดการขับขี่แบบเต็มขั้นในการขับเคลื่อนมอเตอร์สเต็ปปิ้งแบบไฮบริด เนื่องจากจะทำให้เกิดการสั่นสะเทือนมากขึ้นเมื่อขับขี่แบบเต็มขั้น
มอเตอร์สเต็ปเปอร์แบบไฮบริดเหมาะสำหรับงานที่ต้องการความเร็วต่ำ เราแนะนำว่าความเร็วไม่ควรเกิน 1000 รอบต่อนาที (6666 PPS ที่ 0.9 องศา) โดยควรอยู่ระหว่าง 1000-3000 PPS (0.9 องศา) และสามารถต่อกับเกียร์ทดรอบเพื่อลดความเร็วได้ มอเตอร์ชนิดนี้มีประสิทธิภาพการทำงานสูงและเสียงรบกวนต่ำที่ความถี่ที่เหมาะสม
เนื่องจากเหตุผลทางประวัติศาสตร์ มอเตอร์ที่มีแรงดันไฟฟ้าระบุ 12V เท่านั้นที่จะใช้แรงดันไฟฟ้า 12V แรงดันไฟฟ้าอื่นๆ ที่ระบุไว้ในแบบร่างอาจไม่ใช่แรงดันไฟฟ้าที่เหมาะสมที่สุดสำหรับมอเตอร์ ลูกค้าควรเลือกแรงดันไฟฟ้าและตัวขับมอเตอร์ที่เหมาะสมตามความต้องการของตนเอง
เมื่อใช้งานมอเตอร์ด้วยความเร็วสูงหรือรับภาระมาก โดยทั่วไปแล้วมอเตอร์จะไม่เริ่มทำงานที่ความเร็วปกติโดยตรง เราแนะนำให้ค่อยๆ เพิ่มความถี่และความเร็วทีละน้อย ด้วยเหตุผลสองประการ คือ ประการแรก มอเตอร์จะไม่สูญเสียขั้นตอน และประการที่สอง จะช่วยลดเสียงรบกวนและปรับปรุงความแม่นยำในการกำหนดตำแหน่ง
มอเตอร์ไม่ควรทำงานในช่วงที่มีการสั่นสะเทือนสูง (ต่ำกว่า 600 รอบต่อวินาที) หากจำเป็นต้องใช้งานที่ความเร็วต่ำ ปัญหาการสั่นสะเทือนสามารถลดลงได้โดยการเปลี่ยนแรงดัน กระแส หรือเพิ่มวัสดุลดแรงสั่นสะเทือน
เมื่อมอเตอร์ทำงานที่ความเร็วรอบต่ำกว่า 600 PPS (0.9 องศา) ควรใช้กระแสไฟฟ้าน้อย ค่าเหนี่ยวนำสูง และแรงดันไฟฟ้าต่ำในการขับเคลื่อน
สำหรับอุปกรณ์ที่มีโมเมนต์ความเฉื่อยสูง ควรเลือกใช้มอเตอร์ขนาดใหญ่
เมื่อต้องการความแม่นยำสูงขึ้น สามารถแก้ไขได้โดยการเพิ่มเกียร์ เพิ่มความเร็วของมอเตอร์ หรือใช้การขับแบบแบ่งย่อย นอกจากนี้ยังสามารถใช้มอเตอร์ 5 เฟส (มอเตอร์ขั้วเดียว) ได้ แต่ราคาของระบบทั้งหมดค่อนข้างสูง จึงไม่ค่อยได้ใช้กัน
ขนาดมอเตอร์สเต็ปเปอร์
ขณะนี้เรามีมอเตอร์สเต็ปเปอร์แบบไฮบริดขนาด 20 มม. (NEMA8), 28 มม. (NEMA11), 35 มม. (NEMA14), 42 มม. (NEMA17), 57 มม. (NEMA23) และ 86 มม. (NEMA34) เราแนะนำให้ตรวจสอบขนาดมอเตอร์ก่อน จากนั้นจึงตรวจสอบพารามิเตอร์อื่นๆ เมื่อเลือกมอเตอร์สเต็ปเปอร์แบบไฮบริด
บริการปรับแต่ง
เราให้บริการปรับแต่งมอเตอร์ตามความต้องการ รวมถึงจำนวนสายไฟ (4 สาย/6 สาย/8 สาย), ความต้านทานของขดลวด, ความยาวและสีของสายเคเบิล นอกจากนี้เรายังมีระดับความสูงให้ลูกค้าเลือกได้หลายระดับ
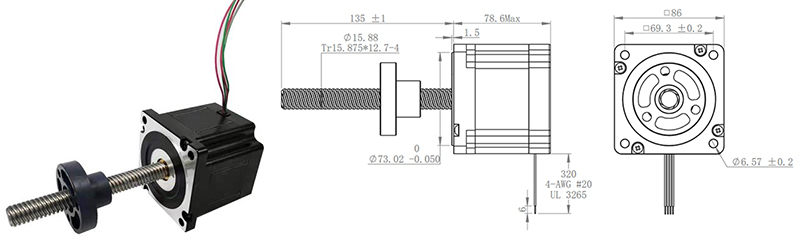
เพลาส่งกำลังปกติจะเป็นเพลา D หากลูกค้าต้องการเพลาแบบมีเกลียวนำ เรามีบริการปรับแต่งเกลียวนำตามความต้องการ และลูกค้าสามารถปรับชนิดของเกลียวนำและความยาวของเพลาได้
ภาพด้านล่างเป็นตัวอย่างมอเตอร์สเต็ปเปอร์ไฮบริดทั่วไปที่มีสกรูนำแบบสี่เหลี่ยมคางหมู
ระยะเวลานำส่ง
หากเรามีสินค้าตัวอย่างในสต็อก เราสามารถจัดส่งตัวอย่างได้ภายใน 3 วัน
หากเราไม่มีสินค้าตัวอย่างในสต็อก เราจำเป็นต้องผลิตขึ้นมาใหม่ ซึ่งใช้เวลาในการผลิตประมาณ 20 วันทำการ
สำหรับการผลิตจำนวนมาก ระยะเวลานำส่งขึ้นอยู่กับปริมาณการสั่งซื้อ
วิธีการชำระเงินและเงื่อนไขการชำระเงิน
โดยทั่วไปแล้ว สำหรับการส่งตัวอย่างสินค้า เรารับชำระเงินผ่าน PayPal หรือ Alibaba
สำหรับการผลิตจำนวนมาก เรารับชำระเงินผ่านการโอนเงินทางธนาคาร (T/T)
สำหรับการส่งตัวอย่างสินค้า เราจะเรียกเก็บเงินเต็มจำนวนก่อนเริ่มการผลิต
สำหรับการผลิตจำนวนมาก เราสามารถรับชำระเงินล่วงหน้า 50% ก่อนการผลิต และเรียกเก็บเงินส่วนที่เหลือ 50% ก่อนการจัดส่ง
หลังจากที่เราร่วมมือกันสั่งซื้อสินค้ามากกว่า 6 ครั้ง เราสามารถเจรจาเงื่อนไขการชำระเงินอื่นๆ ได้ เช่น การชำระเงินเมื่อเห็นเอกสาร (A/S - After Sight)
ส่งข้อความของคุณมาถึงเรา:
หมวดหมู่สินค้า
-

มอเตอร์ไฮบริด NEMA 17 ประสิทธิภาพสูง พร้อมระบบเฟืองดาวเคราะห์...
-

มอเตอร์สเต็ปเปอร์ PM ขนาดเล็ก 8 มม. พร้อมเกียร์บ็อกซ์ 10 มม.*8 มม.
-
มอเตอร์สเต็ปเปอร์แบบเฟืองตัวหนอนขนาด 15 มม. พร้อมเกียร์ทดรอบแบบเฟืองตัวหนอน...
-

มอเตอร์สเต็ปเปอร์ PM ความแม่นยำสูง 20 มม. พร้อมวงจร...
-
10-817G มอเตอร์สเต็ปเปอร์ 10 มม. พร้อมหน่วยความจำแนวนอน 1024GB...
-

มอเตอร์สเต็ปเปอร์ไมโครเกียร์ 25PM มอเตอร์เชิงเส้นสำหรับ...