.jpg)
.jpg)
.jpg)
.jpg)
มอเตอร์สเต็ปเปอร์ไฮบริด Nema 23 (57 มม.) แบบไบโพลาร์ 4 ขั้ว สกรูเกลียว ACME เสียงรบกวนต่ำ อายุการใช้งานยาวนาน ประสิทธิภาพสูง
มอเตอร์สเต็ปเปอร์ไฮบริด Nema 23 (57 มม.) แบบไบโพลาร์ 4 ขั้ว สกรูเกลียว ACME เสียงรบกวนต่ำ อายุการใช้งานยาวนาน ประสิทธิภาพสูง
มอเตอร์สเต็ปเปอร์ไฮบริดขนาด 57 มม. นี้มีให้เลือก 3 แบบ ได้แก่ แบบขับเคลื่อนภายนอก แบบผ่านแกน และแบบผ่านแกนคงที่ คุณสามารถเลือกได้ตามความต้องการเฉพาะของคุณ
มอเตอร์นี้มีจำหน่ายในขนาด 20 มม., 28 มม., 35 มม., 42 มม., 57 มม. และ 86 มม.
ระยะการปรับ: 0.001524 มม. ถึง 0.127 มม.
ประสิทธิภาพ แรงขับสูงสุดถึง 240 กก. อุณหภูมิเพิ่มขึ้นต่ำ การสั่นสะเทือนต่ำ เสียงรบกวนต่ำ อายุการใช้งานยาวนาน (สูงสุด 5 ล้านรอบ) ความแม่นยำในการกำหนดตำแหน่งสูง (สูงสุด ±0.01 มม.)
คำอธิบาย
| ชื่อผลิตภัณฑ์ | มอเตอร์สเต็ปเปอร์ไฮบริด 57 มม. |
| แบบอย่าง | วีเอสเอ็ม57เอชเอสเอ็ม |
| พิมพ์ | มอเตอร์สเต็ปเปอร์ไฮบริด |
| มุมขั้นบันได | 1.8° |
| แรงดันไฟฟ้า (V) | 2.3 / 3 / 3.1 / 3.8 |
| กระแสไฟฟ้า (A) | 3/4 |
| ความต้านทาน (โอห์ม) | 0.75 / 1 / 0.78 / 0.95 |
| ค่าความเหนี่ยวนำ (มิลลิเฮนรี) | 2.5 / 4.5 / 3.3 / 4.5 |
| สายไฟนำ | 4 |
| ความยาวมอเตอร์ (มม.) | 45 / 55 / 65 / 75 |
| อุณหภูมิแวดล้อม | -20℃ ถึง +50℃ |
| อุณหภูมิสูงขึ้น | สูงสุด 80K |
| ความแข็งแรงของไดอิเล็กทริก | กระแสไฟสูงสุด 1mA ที่ 500V, 1KHz, 1 วินาที |
| ความต้านทานฉนวน | ความต้านทานขั้นต่ำ 100MΩ ที่ 500Vdc |
ใบรับรอง

พารามิเตอร์ทางไฟฟ้า:
| ขนาดมอเตอร์ | แรงดันไฟฟ้า /เฟส (วี) | ปัจจุบัน /เฟส (ก) | ความต้านทาน /เฟส (Ω) | ความเหนี่ยวนำ /เฟส (มิลลิเฮกตาร์) | จำนวนของ สายไฟนำ | ความเฉื่อยของโรเตอร์ (กรัม.ซม.)2) | น้ำหนักมอเตอร์ (ก) | ความยาวมอเตอร์ L (มม.) |
| 57 | 2.3 | 3 | 0.75 | 2.5 | 4 | 150 | 580 | 45 |
| 57 | 3 | 3 | 1 | 4.5 | 4 | 300 | 710 | 55 |
| 57 | 3.1 | 4 | 0.78 | 3.3 | 4 | 400 | 880 | 65 |
| 57 | 3.8 | 4 | 0.95 | 4.5 | 4 | 480 | 950 | 75 |
ข้อมูลจำเพาะและพารามิเตอร์ประสิทธิภาพของสกรูนำร่อง
| เส้นผ่านศูนย์กลาง (มม.) | ตะกั่ว (มม.) | ขั้นตอน (มม.) | แรงล็อคอัตโนมัติเมื่อปิดเครื่อง (น) |
| 9.525 | 1.27 | 0.00635 | 800 |
| 9.525 | 2.54 | 0.0127 | 300 |
| 9.525 | 5.08 | 0.0254 | 90 |
| 9.525 | 10.16 | 0.0508 | 30 |
| 9.525 | 25.4 | 0.127 | 6 |
หมายเหตุ: สำหรับข้อมูลเพิ่มเติมเกี่ยวกับคุณสมบัติของสกรูนำ โปรดติดต่อเรา
ภาพร่างโครงร่างมอเตอร์ภายนอกมาตรฐาน VSM57HSM:
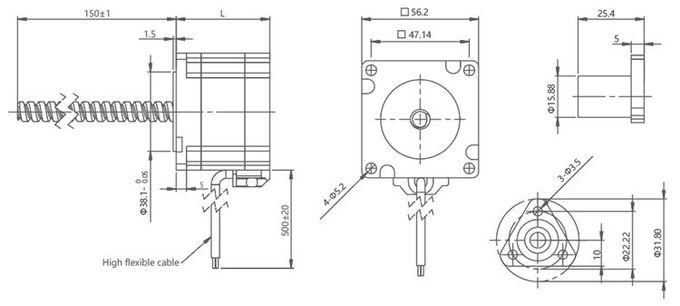
หมายเหตุ:
ความยาวของสกรูนำสามารถปรับแต่งได้ตามต้องการ
การกลึงขึ้นรูปตามสั่งนั้นสามารถทำได้ที่ปลายสกรูนำ
ภาพร่างโครงร่างมอเตอร์สเต็ปเปอร์ไฮบริด 57 มม. แบบมาตรฐาน:
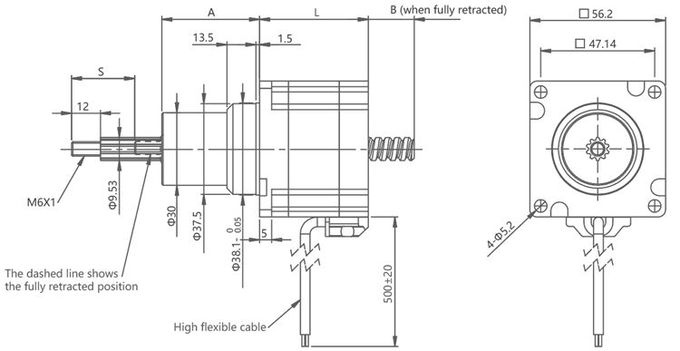
หมายเหตุ:
การกลึงขึ้นรูปตามสั่งนั้นสามารถทำได้ที่ปลายสกรูนำ
| โรคหลอดเลือดสมอง (มม.) | มิติ A (มม.) | ขนาด B (มม.) | |||
| L = 45 | แอล = 55 | แอล = 65 | L = 75 | ||
| 12.7 | 24.1 | 1.1 | 0 | 0 | 0 |
| 19.1 | 30.5 | 7.5 | 0 | 0 | 0 |
| 25.4 | 36.8 | 13.8 | 4.8 | 0 | 0 |
| 31.8 | 43.2 | 20.2 | 11.2 | 0.2 | 0 |
| 38.1 | 49.5 | 26.5 | 17.5 | 6.5 | 0 |
| 50.8 | 62.2 | 39.2 | 30.2 | 19.2 | 9.1 |
| 63.5 | 74.9 | 51.9 | 42.9 | 31.9 | 21.9 |
ภาพร่างโครงร่างมอเตอร์สเต็ปเปอร์ไฮบริด 57 มม. แบบยึดผ่านมาตรฐาน
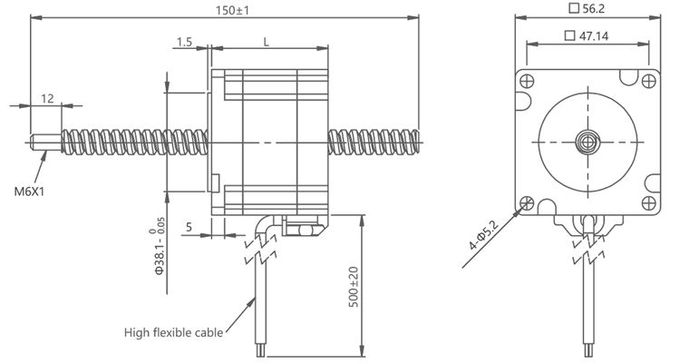
หมายเหตุ:
ความยาวของสกรูนำสามารถปรับแต่งได้ตามต้องการ
การกลึงขึ้นรูปตามสั่งนั้นสามารถทำได้ที่ปลายสกรูนำ
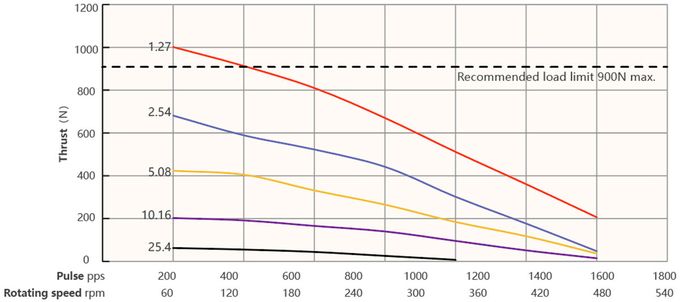
กราฟแสดงความเร็วและแรงขับ:
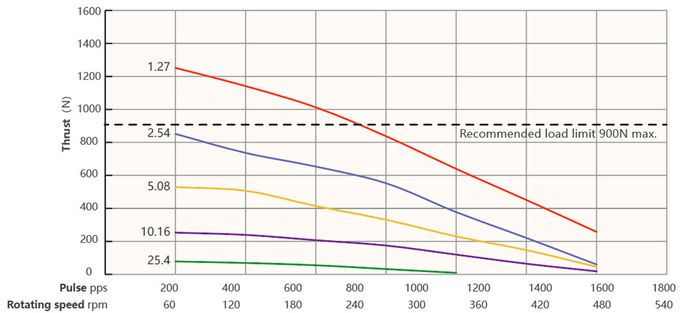
ไดรฟ์ชอปเปอร์แบบไบโพลาร์ ความยาวมอเตอร์ 45 มม. ซีรี่ส์ 57
ความถี่พัลส์กระแสไฟฟ้า 100% และเส้นโค้งแรงขับ (สกรูนำขนาดเส้นผ่านศูนย์กลาง 9.525 มม.)
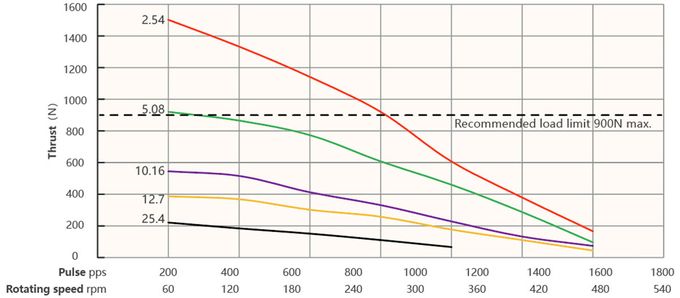
ไดรฟ์ชอปเปอร์แบบไบโพลาร์ ความยาวมอเตอร์ 55 มม. ซีรี่ส์ 57
ความถี่พัลส์กระแสไฟฟ้า 100% และเส้นโค้งแรงขับ (สกรูนำขนาดเส้นผ่านศูนย์กลาง 9.525 มม.)
| ตะกั่ว (มม.) | ความเร็วเชิงเส้น (มม./วินาที) | ||||||||
| 1.27 | 1.27 | 2.54 | 3.81 | 5.08 | 6.35 | 7.62 | 8.89 | 10.16 | 11.43 |
| 2.54 | 2.54 | 5.08 | 7.62 | 10.16 | 12.7 | 15.24 | 17.78 | 20.32 | 22.86 |
| 5.08 | 5.08 | 10.16 | 15.24 | 20.32 | 25.4 | 30.48 | 35.56 | 40.64 | 45.72 |
| 10.16 | 10.16 | 20.32 | 30.48 | 40.64 | 50.8 | 60.96 | 71.12 | 81.28 | 91.44 |
| 25.4 | 25.4 | 50.8 | 76.2 | 101.6 | 127 | 152.4 | 711.8 | 203.2 | 228.6 |
เงื่อนไขการทดสอบ:
วงจรขับชอปเปอร์, ไม่มีการเร่งความเร็ว, ไมโครสเต็ปครึ่งรอบ, แรงดันไฟขับ 40V
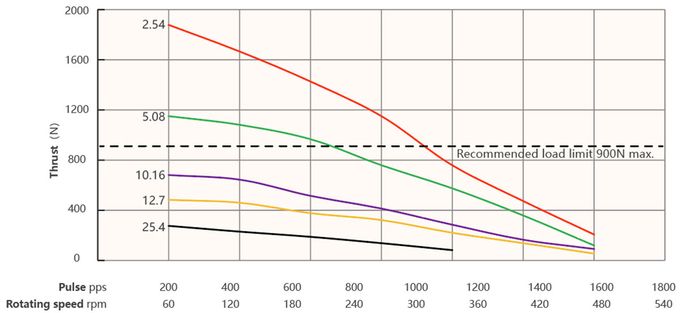
ไดรฟ์ชอปเปอร์แบบไบโพลาร์ ความยาวมอเตอร์ 65 มม. ซีรี่ส์ 57
ความถี่พัลส์กระแสไฟฟ้า 100% และเส้นโค้งแรงขับ (สกรูนำขนาดเส้นผ่านศูนย์กลาง 9.525 มม.)
ไดรฟ์ชอปเปอร์แบบไบโพลาร์ความยาวมอเตอร์ 75 มม. ซีรี่ส์ 57
ความถี่พัลส์กระแสไฟฟ้า 100% และเส้นโค้งแรงขับ (สกรูนำขนาดเส้นผ่านศูนย์กลาง 9.525 มม.)
| ตะกั่ว (มม.) | ความเร็วเชิงเส้น (มม./วินาที) | ||||||||
| 1.27 | 1.27 | 2.54 | 3.81 | 5.08 | 6.35 | 7.62 | 8.89 | 10.16 | 11.43 |
| 2.54 | 2.54 | 5.08 | 7.62 | 10.16 | 12.7 | 15.24 | 17.78 | 20.32 | 22.86 |
| 5.08 | 5.08 | 10.16 | 15.24 | 20.32 | 25.4 | 30.48 | 35.56 | 40.64 | 45.72 |
| 10.16 | 10.16 | 20.32 | 30.48 | 40.64 | 50.8 | 60.96 | 71.12 | 81.28 | 91.44 |
| 25.4 | 25.4 | 50.8 | 76.2 | 101.6 | 127 | 152.4 | 711.8 | 203.2 | 228.6 |
เงื่อนไขการทดสอบ:
วงจรขับชอปเปอร์, ไม่มีการเร่งความเร็ว, ไมโครสเต็ปครึ่งรอบ, แรงดันไฟขับ 40V
ขอบเขตการประยุกต์ใช้
การพิมพ์ 3 มิติ:มอเตอร์สเต็ปเปอร์ไฮบริดขนาด 57 มม. ถูกนำมาใช้กันอย่างแพร่หลายในเครื่องพิมพ์ 3 มิติ เพื่อควบคุมตำแหน่งและการเคลื่อนที่ของหัวพิมพ์
เครื่องมือเครื่องจักร CNC:ในเครื่องมือกลควบคุมด้วยระบบคอมพิวเตอร์ (CNC) มอเตอร์สเต็ปเปอร์ไฮบริดขนาด 57 มม. ถูกนำมาใช้เพื่อควบคุมการเคลื่อนที่ของเครื่องมือตัดสำหรับการทำงานตัดเฉือนที่แม่นยำ
อุปกรณ์ระบบอัตโนมัติ:มอเตอร์สเต็ปเปอร์ไฮบริดขนาด 57 มม. สามารถนำไปใช้ในอุปกรณ์อัตโนมัติหลากหลายประเภท เช่น เครื่องบรรจุภัณฑ์อัตโนมัติ ระบบคัดแยกอัตโนมัติ สายการประกอบอัตโนมัติ เป็นต้น เพื่อควบคุมการเคลื่อนที่และการกำหนดตำแหน่ง
เครื่องจักรสิ่งทอ:ในอุตสาหกรรมสิ่งทอ มอเตอร์สเต็ปเปอร์ไฮบริดขนาด 57 มม. สามารถใช้ควบคุมเครื่องปั่นด้าย เครื่องทอผ้า และอุปกรณ์อื่นๆ เพื่อให้มั่นใจในความแม่นยำและเสถียรภาพของกระบวนการผลิตสิ่งทอ
อุปกรณ์ทางการแพทย์:มอเตอร์สเต็ปเปอร์ไฮบริดขนาด 57 มม. ถูกนำมาใช้กันอย่างแพร่หลายในอุปกรณ์ทางการแพทย์ เช่น ปั๊มฉีดยาทางการแพทย์ หุ่นยนต์ทางการแพทย์ อุปกรณ์สแกนภาพ ฯลฯ เพื่อการควบคุมตำแหน่งและการเคลื่อนที่ที่แม่นยำ
วิทยาการหุ่นยนต์:มอเตอร์สเต็ปเปอร์ไฮบริดขนาด 57 มม. ถูกนำไปใช้ในงานหุ่นยนต์หลากหลายประเภท รวมถึงหุ่นยนต์อุตสาหกรรม หุ่นยนต์บริการ หุ่นยนต์ร่วมปฏิบัติงาน ฯลฯ เพื่อการเคลื่อนไหวและการควบคุมที่แม่นยำ
ระบบคลังสินค้าอัตโนมัติ:ในระบบคลังสินค้าและโลจิสติกส์อัตโนมัติ มอเตอร์สเต็ปเปอร์ไฮบริดขนาด 57 มม. สามารถใช้ควบคุมสายพานลำเลียง ลิฟต์ เครนยกสินค้า และอุปกรณ์อื่นๆ เพื่อให้ได้การวางตำแหน่งและการจัดการสินค้าที่แม่นยำ
นี่เป็นเพียงตัวอย่างการใช้งานทั่วไปบางส่วนของมอเตอร์สเต็ปเปอร์ไฮบริดขนาด 57 มม. และในความเป็นจริงแล้ว มอเตอร์เหล่านี้ถูกนำไปใช้อย่างแพร่หลายในหลายสาขาอื่นๆ รวมถึงอุปกรณ์การพิมพ์ ระบบรักษาความปลอดภัย เครื่องมือวัดความแม่นยำ และอื่นๆ อีกมากมาย
ข้อได้เปรียบ
อัตราส่วนแรงบิดต่อขนาดสูง:แม้จะมีขนาดกะทัดรัด แต่สเต็ปเปอร์มอเตอร์ไฮบริดขนาด 57 มม. สามารถให้แรงบิดสูงได้ ทำให้เหมาะสำหรับงานที่พื้นที่จำกัด แต่ต้องการแรงบิดสูง
การควบคุมแบบวงเปิด:มอเตอร์สเต็ปเปอร์แบบไฮบริดสามารถทำงานในระบบควบคุมแบบวงเปิดได้ ซึ่งหมายความว่าไม่จำเป็นต้องใช้อุปกรณ์ป้อนกลับตำแหน่ง เช่น ตัวเข้ารหัส ทำให้ระบบควบคุมง่ายขึ้นและลดต้นทุนโดยรวม
การกำหนดตำแหน่งที่แม่นยำ:มอเตอร์สเต็ปเปอร์แบบไฮบริดให้ความสามารถในการกำหนดตำแหน่งที่แม่นยำเนื่องจากความละเอียดในการเคลื่อนที่แต่ละขั้น สามารถเคลื่อนที่ได้ทีละน้อย ทำให้ได้ตำแหน่งที่แม่นยำและทำซ้ำได้
การทำงานราบรื่น:มอเตอร์สเต็ปเปอร์แบบไฮบริดสามารถทำงานได้อย่างราบเรียบ โดยเฉพาะอย่างยิ่งเมื่อใช้เทคนิคไมโครสเต็ปปิ้ง ไมโครสเต็ปปิ้งจะแบ่งแต่ละขั้นออกเป็นขั้นย่อยๆ ที่เล็กกว่า ทำให้การเคลื่อนไหวราบเรียบขึ้นและลดการสั่นสะเทือน
ตอบสนองรวดเร็ว:มอเตอร์สเต็ปเปอร์แบบไฮบริดมีเวลาตอบสนองที่รวดเร็ว ทำให้สามารถเร่งความเร็วและลดความเร็วได้อย่างรวดเร็ว คุณสมบัตินี้เป็นประโยชน์อย่างยิ่งสำหรับงานที่ต้องการการเคลื่อนไหวที่คล่องตัวและว่องไว
ความน่าเชื่อถือและความทนทานสูง:มอเตอร์สเต็ปเปอร์แบบไฮบริดขึ้นชื่อเรื่องความแข็งแรงทนทานและความน่าเชื่อถือ มีอายุการใช้งานยาวนาน ต้องการการบำรุงรักษาต่ำ และสามารถทนต่อสภาวะการทำงานที่รุนแรงได้
โซลูชันที่คุ้มค่า:เมื่อเปรียบเทียบกับเทคโนโลยีควบคุมการเคลื่อนที่อื่นๆ เช่น มอเตอร์เซอร์โว มอเตอร์สเต็ปเปอร์แบบไฮบริดโดยทั่วไปแล้วให้โซลูชันที่คุ้มค่ากว่า โดยให้ความสมดุลที่ดีระหว่างประสิทธิภาพและราคาที่เหมาะสม
การผสานรวมที่ง่ายดาย:มอเตอร์สเต็ปเปอร์แบบไฮบริดมีจำหน่ายอย่างแพร่หลายและเข้ากันได้กับอุปกรณ์อิเล็กทรอนิกส์ขับเคลื่อนและระบบควบคุมต่างๆ สามารถนำไปผสานรวมเข้ากับเครื่องจักรและระบบอัตโนมัติประเภทต่างๆ ได้อย่างง่ายดาย
ประสิทธิภาพการใช้พลังงาน:มอเตอร์สเต็ปเปอร์แบบไฮบริดใช้พลังงานเฉพาะเมื่อกำลังเคลื่อนที่เท่านั้น ทำให้ประหยัดพลังงาน เมื่อหยุดนิ่งก็ไม่จำเป็นต้องใช้พลังงานอย่างต่อเนื่อง ซึ่งช่วยประหยัดพลังงานโดยรวม
ข้อกำหนดในการเลือกมอเตอร์:
►ทิศทางการเคลื่อนที่/การติดตั้ง
►ข้อกำหนดในการโหลด
►ข้อกำหนดเกี่ยวกับโรคหลอดเลือดสมอง
►ข้อกำหนดการกลึงขั้นสุดท้าย
►ข้อกำหนดด้านความแม่นยำ
►ข้อกำหนดการตอบรับจากตัวเข้ารหัส
►ข้อกำหนดการปรับแต่งด้วยตนเอง
►ข้อกำหนดด้านสิ่งแวดล้อม
โรงงานผลิต


-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)