





มอเตอร์สเต็ปเปอร์แบบไฮบริดบอลสกรู Nema 23 (57 มม.) มุมก้าว 1.8° สายไฟ 4 เส้น สำหรับอุปกรณ์วินิจฉัยทางการแพทย์
มอเตอร์สเต็ปเปอร์แบบไฮบริดบอลสกรู Nema 23 (57 มม.) มุมก้าว 1.8° สายไฟ 4 เส้น สำหรับอุปกรณ์วินิจฉัยทางการแพทย์
มอเตอร์สเต็ปเปอร์ไฮบริด Nema 23 (57 มม.) แบบไบโพลาร์ 4 ขั้ว สกรูบอล เสียงรบกวนต่ำ อายุการใช้งานยาวนาน ประสิทธิภาพสูง ได้รับการรับรอง CE และ RoHS
รับน้ำหนักได้มาก การสั่นสะเทือนน้อย เสียงรบกวนต่ำ ความเร็วสูง การตอบสนองรวดเร็ว การทำงานราบรื่น อายุการใช้งานยาวนาน ความแม่นยำในการกำหนดตำแหน่งสูง (สูงสุด ±0.005 มม.)
คำอธิบาย
| ชื่อผลิตภัณฑ์ | มอเตอร์สเต็ปเปอร์บอลสกรูไฮบริด 57 มม. |
| แบบอย่าง | VSM57BSHSM |
| พิมพ์ | มอเตอร์สเต็ปเปอร์ไฮบริด |
| มุมขั้นบันได | 1.8° |
| แรงดันไฟฟ้า (V) | 2.3 / 3 / 3.1 / 3.8 |
| กระแสไฟฟ้า (A) | 3/4 |
| ความต้านทาน (โอห์ม) | 0.75 / 1 / 0.78 / 0.95 |
| ค่าความเหนี่ยวนำ (มิลลิเฮนรี) | 2.5 / 4.5 / 3.3 / 4.5 |
| สายไฟนำ | 4 |
| ความยาวมอเตอร์ (มม.) | 45 / 55 / 65 / 75 |
| อุณหภูมิแวดล้อม | -20℃ ถึง +50℃ |
| อุณหภูมิสูงขึ้น | สูงสุด 80K |
| ความแข็งแรงของไดอิเล็กทริก | กระแสไฟสูงสุด 1mA ที่ 500V, 1KHz, 1 วินาที |
| ความต้านทานฉนวน | ความต้านทานขั้นต่ำ 100MΩ ที่ 500Vdc |
ใบรับรอง

พารามิเตอร์ทางไฟฟ้า:
| ขนาดมอเตอร์ | แรงดันไฟฟ้า /เฟส (วี) | ปัจจุบัน /เฟส (ก) | ความต้านทาน /เฟส (Ω) | ความเหนี่ยวนำ /เฟส (มิลลิเฮกตาร์) | จำนวนของ สายไฟนำ | ความเฉื่อยของโรเตอร์ (กรัม.ซม.)2) | น้ำหนักมอเตอร์ (ก) | ความยาวมอเตอร์ L (มม.) |
| 57 | 2.3 | 3 | 0.75 | 2.5 | 4 | 150 | 580 | 45 |
| 57 | 3 | 3 | 1 | 4.5 | 4 | 300 | 710 | 55 |
| 57 | 3.1 | 4 | 0.78 | 3.3 | 4 | 400 | 880 | 65 |
| 57 | 3.8 | 4 | 0.95 | 4.5 | 4 | 480 | 950 | 75 |
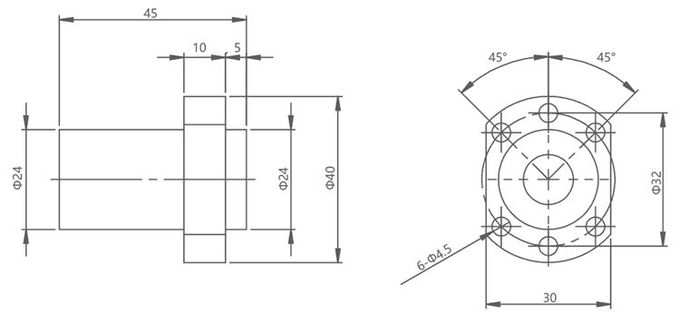
ภาพร่างโครงร่างมอเตอร์ภายนอกมาตรฐาน VSM57BSHSM:
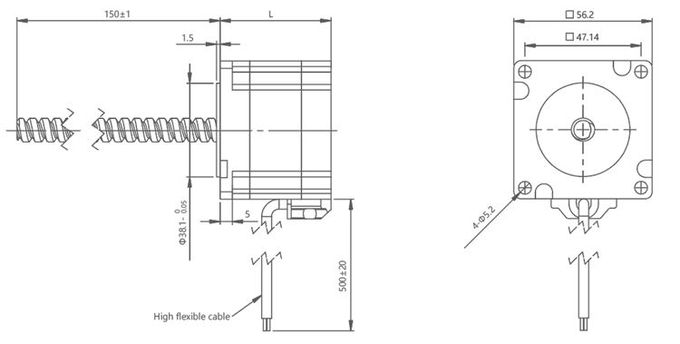
หมายเหตุ:
ความยาวของสกรูนำสามารถปรับแต่งได้ตามต้องการ
การกลึงขึ้นรูปตามสั่งนั้นสามารถทำได้ที่ปลายสกรูนำ
โปรดติดต่อเราเพื่อขอข้อมูลจำเพาะเพิ่มเติมเกี่ยวกับบอลสกรู
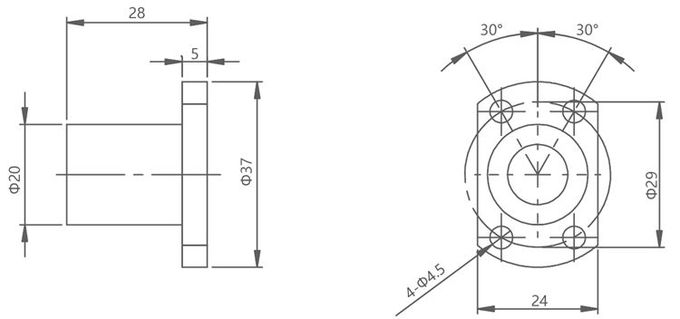
ภาพร่างโครงร่างน็อตบอล VSM57BSHSM 1202:
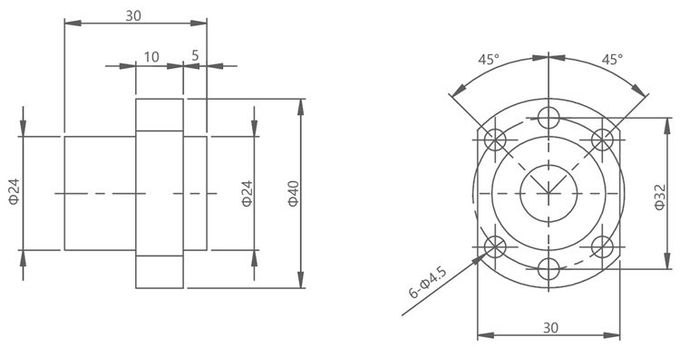
ภาพร่างโครงร่างน็อตบอล VSM57BSHSM 1205:
ภาพร่างโครงร่างน็อตบอล VSM57BSHSM 1210:
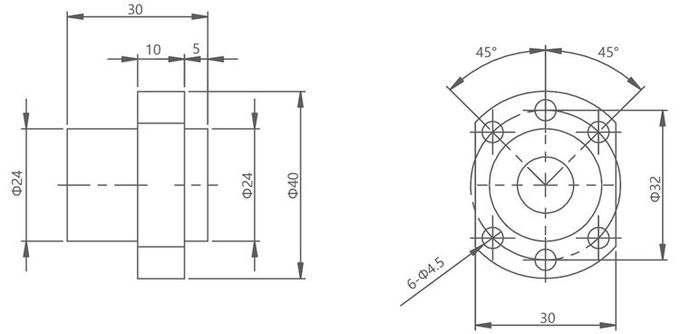
ภาพร่างโครงร่างน็อตบอล VSM57BSHSM 1210:
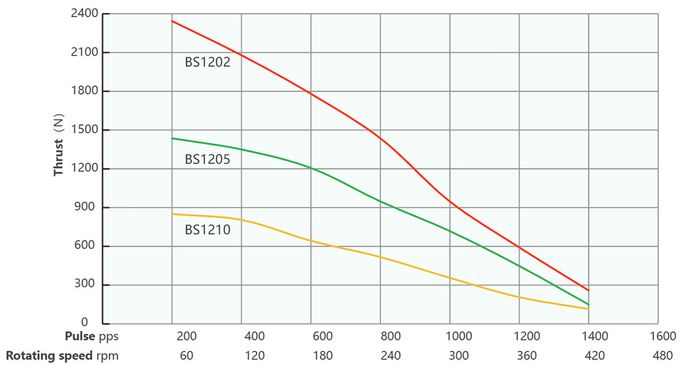
กราฟความเร็วและแรงขับ
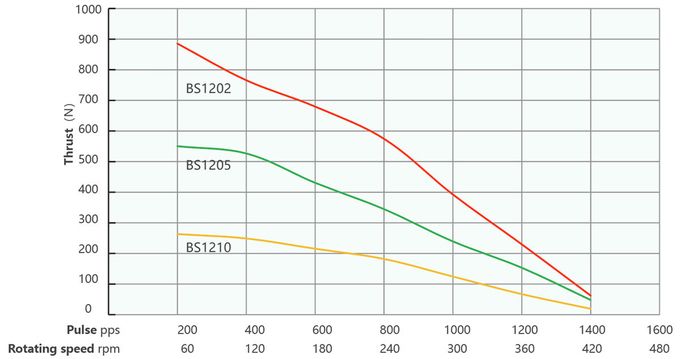
ไดรฟ์ชอปเปอร์แบบไบโพลาร์ ความยาวมอเตอร์ 45 มม. ซีรี่ส์ 57
ความถี่พัลส์กระแสไฟฟ้า 100% และเส้นโค้งแรงขับ
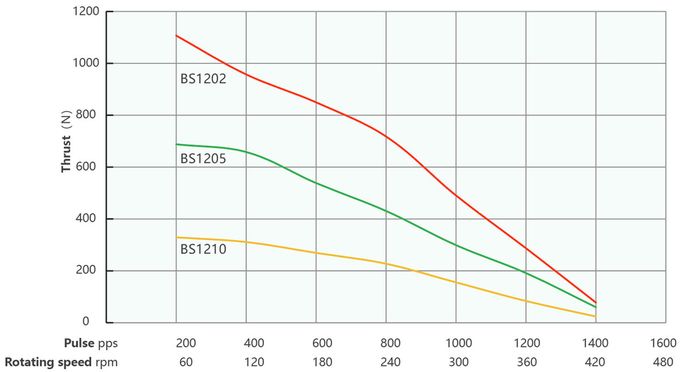
ไดรฟ์ชอปเปอร์แบบไบโพลาร์ ความยาวมอเตอร์ 55 มม. ซีรี่ส์ 57
ความถี่พัลส์กระแสไฟฟ้า 100% และเส้นโค้งแรงขับ
| ตะกั่ว (มม.) | ความเร็วเชิงเส้น (มม./วินาที) | |||||||
| 2 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 |
| 5 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 |
| 10 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 |
เงื่อนไขการทดสอบ:วงจรขับชอปเปอร์, ไม่มีการเร่งความเร็ว, ไมโครสเต็ปครึ่งรอบ, แรงดันไฟขับ 40V
ไดรฟ์ชอปเปอร์แบบไบโพลาร์ ความยาวมอเตอร์ 65 มม. ซีรี่ส์ 57
ความถี่พัลส์กระแสไฟฟ้า 100% และเส้นโค้งแรงขับ
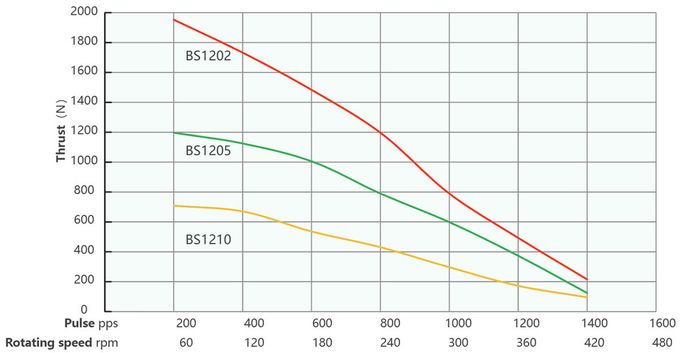
ไดรฟ์ชอปเปอร์แบบไบโพลาร์ความยาวมอเตอร์ 75 มม. ซีรี่ส์ 57
ความถี่พัลส์กระแสไฟฟ้า 100% และเส้นโค้งแรงขับ
| ตะกั่ว (มม.) | ความเร็วเชิงเส้น (มม./วินาที) | |||||||
| 2 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 |
| 5 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 |
| 10 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 |
เงื่อนไขการทดสอบ:วงจรขับชอปเปอร์, ไม่มีการเร่งความเร็ว, ไมโครสเต็ปครึ่งรอบ, แรงดันไฟขับ 40V
ขอบเขตการใช้งาน:
อุปกรณ์วินิจฉัยทางการแพทย์:มอเตอร์สเต็ปเปอร์แบบไฮบริดบอลสกรูขนาด 57 มม. สามารถใช้ในอุปกรณ์วินิจฉัยทางการแพทย์ เช่น เครื่องสแกนภาพ เครื่องสแกน CT เครื่องเอ็กซ์เรย์ เครื่อง MRI และอื่นๆ การควบคุมตำแหน่งที่มีความแม่นยำสูงและความเสถียรช่วยให้การเคลื่อนไหวและการกำหนดตำแหน่งมีความแม่นยำในระหว่างการได้มาและการประมวลผลภาพทางการแพทย์
เครื่องมือวิทยาศาสตร์ชีวภาพ:ในการวิจัยและทดลองด้านวิทยาศาสตร์ชีวภาพ มอเตอร์สเต็ปเปอร์บอลสกรูไฮบริดขนาด 57 มม. ถูกนำไปใช้ในระบบจัดการของเหลวอัตโนมัติ อุปกรณ์คัดกรองความเร็วสูง อุปกรณ์เพาะเลี้ยงเซลล์ เครื่องจัดลำดับยีน และอื่นๆ ความแม่นยำและความน่าเชื่อถือสูงของมอเตอร์เหล่านี้ทำให้สามารถตอบสนองความต้องการในการควบคุมการเคลื่อนที่และตำแหน่งที่แม่นยำในอุปกรณ์ทดลองได้
วิทยาการหุ่นยนต์:มอเตอร์สเต็ปเปอร์แบบบอลสกรูไฮบริดขนาด 57 มม. ถูกนำมาใช้กันอย่างแพร่หลายในงานหุ่นยนต์สำหรับการขับเคลื่อนข้อต่อ การเคลื่อนที่ของแขนหุ่นยนต์ และการกำหนดตำแหน่งที่แม่นยำ มอเตอร์เหล่านี้มีคุณสมบัติเด่นคือแรงบิดสูง ความละเอียดสูง และเสียงรบกวนต่ำ เพื่อตอบสนองความต้องการด้านการเคลื่อนที่และการควบคุมที่แม่นยำในงานหุ่นยนต์
อุปกรณ์เลเซอร์:มอเตอร์สเต็ปเปอร์แบบบอลสกรูไฮบริดขนาด 57 มม. สามารถใช้ในอุปกรณ์เลเซอร์สำหรับงานต่างๆ เช่น การปรับโฟกัส การหมุนโต๊ะ และการควบคุมเส้นทางแสง การควบคุมตำแหน่งที่มีความแม่นยำสูงและความเสถียรช่วยให้สามารถโฟกัสและวางตำแหน่งลำแสงเลเซอร์ได้อย่างแม่นยำ
เครื่องมือวิเคราะห์:มอเตอร์สเต็ปเปอร์บอลสกรูไฮบริดขนาด 57 มม. สามารถใช้ในเครื่องมือวิเคราะห์ทางห้องปฏิบัติการประเภทต่างๆ เช่น ระบบประมวลผลตัวอย่างอัตโนมัติ ระบบป้อนตัวอย่าง เครื่องโครมาโทกราฟของเหลว เครื่องโครมาโทกราฟแก๊ส เป็นต้น การเคลื่อนที่ที่มีความแม่นยำสูงและประสิทธิภาพที่เสถียรของมอเตอร์เหล่านี้มีบทบาทสำคัญในการปรับปรุงความถูกต้องและประสิทธิภาพของการวิเคราะห์ทางห้องปฏิบัติการ
อุปกรณ์การผลิตเซมิคอนดักเตอร์และอิเล็กทรอนิกส์:มอเตอร์สเต็ปเปอร์แบบบอลสกรูไฮบริดขนาด 57 มม. ใช้สำหรับการกำหนดตำแหน่งที่แม่นยำและการควบคุมอัตโนมัติในอุปกรณ์การผลิตเซมิคอนดักเตอร์และอิเล็กทรอนิกส์ ตัวอย่างเช่น สามารถใช้ในอุปกรณ์ทดสอบชิปเซมิคอนดักเตอร์ เครื่องจักรบรรจุภัณฑ์ เทคโนโลยีการติดตั้งบนพื้นผิว การผลิตแผงวงจรพิมพ์ และด้านอื่นๆ เพื่อให้การควบคุมการเคลื่อนที่ความเร็วสูง ความแม่นยำสูง และเชื่อถือได้
อุปกรณ์ระบบอัตโนมัติที่ไม่เป็นไปตามมาตรฐาน และอุปกรณ์ระบบอัตโนมัติประเภทต่างๆ:มอเตอร์สเต็ปเปอร์บอลสกรูไฮบริดขนาด 57 มม. เหมาะสำหรับอุปกรณ์อัตโนมัติที่ไม่เป็นมาตรฐานและสายการผลิตอัตโนมัติหลากหลายประเภท สามารถใช้ในอุปกรณ์กำหนดตำแหน่ง ระบบประกอบอัตโนมัติ อุปกรณ์บรรจุภัณฑ์ เครื่องพิมพ์ อุปกรณ์สิ่งทอ ฯลฯ ให้การควบคุมตำแหน่งที่แม่นยำและประสิทธิภาพการเคลื่อนที่ที่เชื่อถือได้ เพื่อตอบสนองความต้องการด้านระบบอัตโนมัติในหลากหลายสาขา
ข้อได้เปรียบ
อัตราส่วนแรงบิดต่อแรงเฉื่อยสูง:มอเตอร์สเต็ปเปอร์แบบไฮบริดบอลสกรูมีอัตราส่วนแรงบิดต่อความเฉื่อยสูง ซึ่งหมายความว่าสามารถให้แรงบิดสูงเมื่อเทียบกับขนาดและน้ำหนัก ทำให้เหมาะสำหรับงานที่ต้องการแรงบิดสูงในขนาดกะทัดรัด เช่น หุ่นยนต์ เครื่องจักร CNC และระบบอัตโนมัติ
การเร่งความเร็วและการลดความเร็วสูง:มอเตอร์เหล่านี้สามารถเร่งความเร็วและลดความเร็วได้อย่างรวดเร็ว ทำให้สามารถเคลื่อนไหวได้อย่างรวดเร็วและแม่นยำ แรงเฉื่อยต่ำของโรเตอร์และแรงบิดสูงช่วยให้มอเตอร์ตอบสนองต่อสัญญาณควบคุมได้อย่างรวดเร็ว ส่งผลให้เวลาในการเริ่มและหยุดทำงานเร็วขึ้น และประสิทธิภาพโดยรวมของระบบดีขึ้น
การไมโครสเต็ปแบบราบรื่น:มอเตอร์สเต็ปเปอร์แบบไฮบริดบอลสกรูเหมาะอย่างยิ่งสำหรับการทำงานแบบไมโครสเต็ปปิ้ง ซึ่งช่วยให้ได้ความละเอียดที่สูงกว่าและการควบคุมการเคลื่อนไหวที่ราบรื่นกว่า ไมโครสเต็ปปิ้งจะแบ่งแต่ละขั้นเต็มออกเป็นขั้นย่อยที่เล็กกว่า ลดขนาดขั้น และลดการสั่นสะเทือน เสียงรบกวน และผลกระทบจากเรโซแนนซ์ คุณสมบัตินี้มีประโยชน์อย่างยิ่งในแอปพลิเคชันที่ต้องการการเคลื่อนไหวที่ราบรื่นและแม่นยำ เช่น เครื่องพิมพ์ 3 มิติ และระบบกำหนดตำแหน่งเชิงเส้น
ผลกระทบเชิงลบต่ำ:กลไกสกรูบอลในมอเตอร์เหล่านี้ช่วยลดระยะคลอน ซึ่งเป็นระยะห่างหรือช่องว่างระหว่างโรเตอร์กับโหลด ระยะคลอนต่ำช่วยให้การกำหนดตำแหน่งแม่นยำและทำซ้ำได้ เนื่องจากมีการสูญเสียการเคลื่อนที่น้อยที่สุดเมื่อเปลี่ยนทิศทางหรือกลับทิศทางการเคลื่อนที่ ซึ่งเป็นสิ่งสำคัญสำหรับงานที่ต้องการการกำหนดตำแหน่งที่แม่นยำและทำซ้ำได้ เช่น เครื่องจักรหยิบและวาง และระบบออปติคอล
การตอบสนองแบบไดนามิกสูง:การผสมผสานระหว่างมอเตอร์สเต็ปเปอร์แบบไฮบริดและกลไกสกรูบอลช่วยให้การตอบสนองแบบไดนามิกสูง ซึ่งหมายความว่ามอเตอร์สามารถติดตามการเปลี่ยนแปลงของสัญญาณควบคุมได้อย่างรวดเร็วและแม่นยำ การตอบสนองที่รวดเร็วนี้มีความสำคัญอย่างยิ่งสำหรับแอปพลิเคชันที่เกี่ยวข้องกับการเปลี่ยนแปลงความเร็ว ทิศทาง หรือตำแหน่งอย่างรวดเร็ว เช่น การตัดเฉือนความเร็วสูงและระบบควบคุมการเคลื่อนที่แบบไดนามิก
ประสิทธิภาพเชิงความร้อน:มอเตอร์สเต็ปเปอร์แบบไฮบริดที่ใช้บอลสกรูได้รับการออกแบบให้มีประสิทธิภาพทางความร้อนที่ดี ช่วยให้ระบายความร้อนได้อย่างมีประสิทธิภาพในระหว่างการทำงาน ซึ่งจะช่วยป้องกันความร้อนสูงเกินไปและรับประกันประสิทธิภาพการทำงานของมอเตอร์ที่เสถียร แม้ในระหว่างการใช้งานเป็นเวลานานหรือในงานที่ต้องการประสิทธิภาพสูง
โซลูชันที่คุ้มค่า:มอเตอร์สเต็ปเปอร์แบบไฮบริดที่ใช้บอลสกรูเป็นทางเลือกที่คุ้มค่าสำหรับงานที่ต้องการความแม่นยำและแรงบิดสูง เมื่อเทียบกับระบบเซอร์โวมอเตอร์ที่ซับซ้อนและมีราคาแพงกว่า มอเตอร์สเต็ปเปอร์แบบไฮบริดให้ความสมดุลระหว่างประสิทธิภาพ ต้นทุน และความสะดวกในการใช้งาน จึงมักเป็นตัวเลือกที่ได้รับความนิยมสำหรับงานที่ต้นทุนเป็นปัจจัยสำคัญ โดยไม่ลดทอนคุณภาพและประสิทธิภาพ
ข้อกำหนดในการเลือกมอเตอร์:
►ทิศทางการเคลื่อนที่/การติดตั้ง
►ข้อกำหนดในการโหลด
►ข้อกำหนดเกี่ยวกับโรคหลอดเลือดสมอง
►ข้อกำหนดการกลึงขั้นสุดท้าย
►ข้อกำหนดด้านความแม่นยำ
►ข้อกำหนดการตอบรับจากตัวเข้ารหัส
►ข้อกำหนดการปรับแต่งด้วยตนเอง
►ข้อกำหนดด้านสิ่งแวดล้อม
โรงงานผลิต






