




ฝาครอบมอเตอร์สเต็ปเปอร์แบบแม่เหล็กถาวรขนาด 28 มม. สามารถปรับแต่งได้
คำอธิบาย
นี่คือมอเตอร์สเต็ปเปอร์ลดรอบ PM ที่มีเส้นผ่านศูนย์กลาง 28 มม. พร้อมเฟืองขับและคลัตช์แรงเสียดทาน
อัตราทดเกียร์ของมอเตอร์นี้คือ 16:1, 25:1, 32:1, 48.8:1, 64:1, 85:1
มอเตอร์มีมุมการหมุนต่อขั้น 5.625°/64 และขับเคลื่อนด้วยกระแสไฟฟ้าแบบ 1-2 เฟส หรือ 2-2 เฟส
แรงดันไฟฟ้าที่กำหนด: 5VDC; 12VDC; 24VDC
ข้อกำหนดของสายไฟเชื่อมต่อมอเตอร์และสายคอนเนคเตอร์คือ UL1061 26AWG หรือ UL2464 26AWG
มอเตอร์ชนิดนี้ส่วนใหญ่ใช้ในสุขภัณฑ์ วาล์วควบคุมอุณหภูมิ ก๊อกน้ำร้อน โถสุขภัณฑ์อัจฉริยะ เครื่องปรับอากาศ ระบบปรับอุณหภูมิและปริมาณน้ำอัตโนมัติ กลอนประตู เครื่องกรองน้ำ และเครื่องใช้ในครัวเรือนอื่นๆ อีกมากมาย
นอกจากนี้ ยังสามารถนำไปใช้ในด้านอื่นๆ ที่ต้องการการควบคุมที่แม่นยำได้อีกด้วย เนื่องจากการควบคุมแบบวงเปิด ทำให้สามารถควบคุมตำแหน่งด้วยต้นทุนต่ำได้
ราคาของผลิตภัณฑ์นี้จึงอาจต่ำกว่าผลิตภัณฑ์อื่น ๆ เนื่องจากมีปริมาณการผลิตสูง
นอกจากนี้ยังมีเฟืองอยู่ด้านหน้า โดยทั่วไปวัสดุของเฟืองจะเป็น POM (พลาสติก) เราสามารถเปลี่ยนเป็นเฟืองโลหะได้ แต่จะทำให้ต้นทุนสูงขึ้น
หากคุณสนใจในผลิตภัณฑ์ของเรา คุณสามารถติดต่อฉันได้ตลอดเวลา

พารามิเตอร์
| แรงดันไฟฟ้า (V) | ความต้านทาน(Ω) | แรงบิดในการดึง 100PPS(mN*m) | แรงบิดล็อค (มิลลินิวตันเมตร) | ความถี่การดึงเข้าขณะขนถ่าย (PPS) |
| 5 | 18 | 98 | 29.4 | 500 |
| 12 | 60 | 117 | 29.4 | 500 |
| 12 | 70 | 68.7 | 29.4 | 500 |
| 24 | 200 | 68.7 | 29.4 | 500 |
| 24 | 300 | 58.8 | 29.4 | 500 |
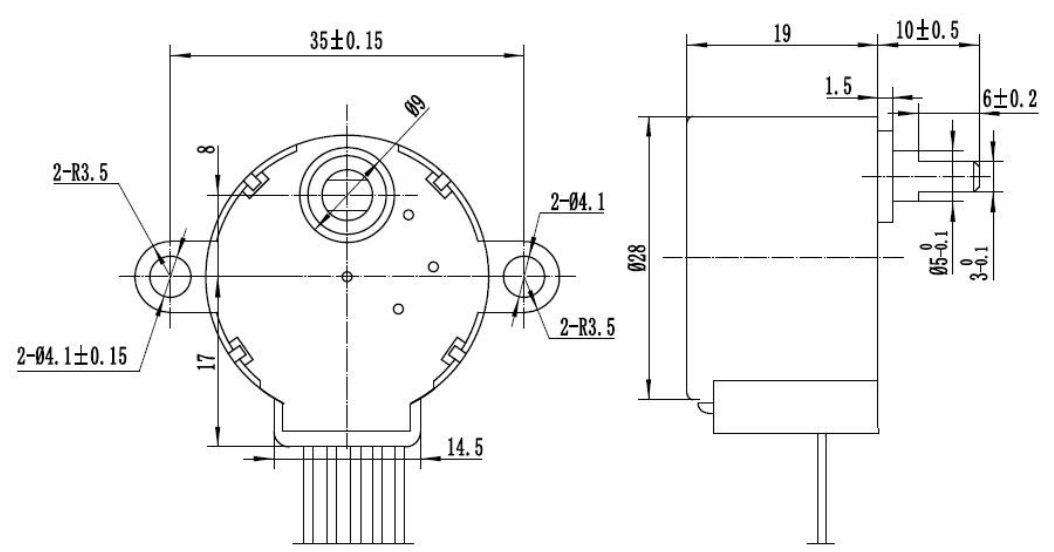
แบบร่างการออกแบบ: เพลาส่งกำลังสามารถปรับแต่งได้
สินค้าที่สามารถปรับแต่งได้
อัตราทดเกียร์
แรงดันไฟฟ้า: 5-24 โวลต์
วัสดุเฟือง
เพลาส่งกำลัง
สามารถปรับแต่งดีไซน์ฝาครอบมอเตอร์ได้
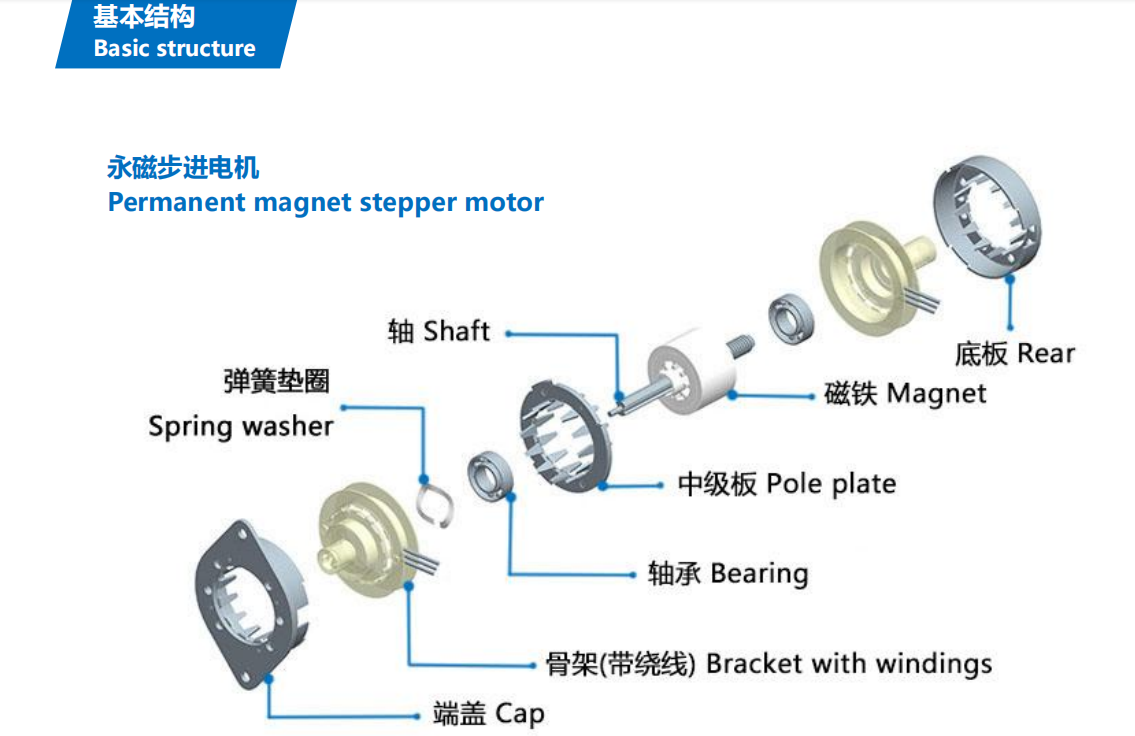
เกี่ยวกับโครงสร้างพื้นฐานของมอเตอร์สเต็ปเปอร์ PM
คุณสมบัติและข้อดี
1. การกำหนดตำแหน่งที่มีความแม่นยำสูง
เนื่องจากสเต็ปเปอร์มอเตอร์เคลื่อนที่ด้วยขั้นตอนที่แม่นยำและทำซ้ำได้ จึงเหมาะอย่างยิ่งสำหรับการใช้งานที่ต้องการความแม่นยำสูง
การกำหนดตำแหน่ง โดยพิจารณาจากจำนวนก้าวที่มอเตอร์เคลื่อนที่
2. การควบคุมความเร็วที่มีความแม่นยำสูง
การเคลื่อนที่แบบเพิ่มทีละน้อยอย่างแม่นยำยังช่วยให้สามารถควบคุมความเร็วในการหมุนสำหรับกระบวนการได้อย่างยอดเยี่ยม
ระบบอัตโนมัติและหุ่นยนต์ ความเร็วในการหมุนถูกกำหนดโดยความถี่ของพัลส์
3. ฟังก์ชันหยุดชั่วคราวและค้างจังหวะ
ด้วยการควบคุมไดรฟ์ มอเตอร์จะมีฟังก์ชันล็อค (มีกระแสไฟฟ้าไหลผ่านขดลวดมอเตอร์ แต่
มอเตอร์ไม่หมุน) และยังคงมีแรงบิดยึดอยู่
4. อายุการใช้งานยาวนานและมีสัญญาณรบกวนทางแม่เหล็กไฟฟ้าต่ำ
มอเตอร์สเต็ปเปอร์ไม่มีแปรงถ่าน และไม่จำเป็นต้องใช้แปรงถ่านในการสลับกระแสเหมือนมอเตอร์แบบมีแปรงถ่าน
มอเตอร์กระแสตรง (DC motor) ไม่มีแรงเสียดทานจากแปรงถ่าน ทำให้มีอายุการใช้งานยาวนานขึ้น ไม่มีประกายไฟ และลดการรบกวนทางแม่เหล็กไฟฟ้า
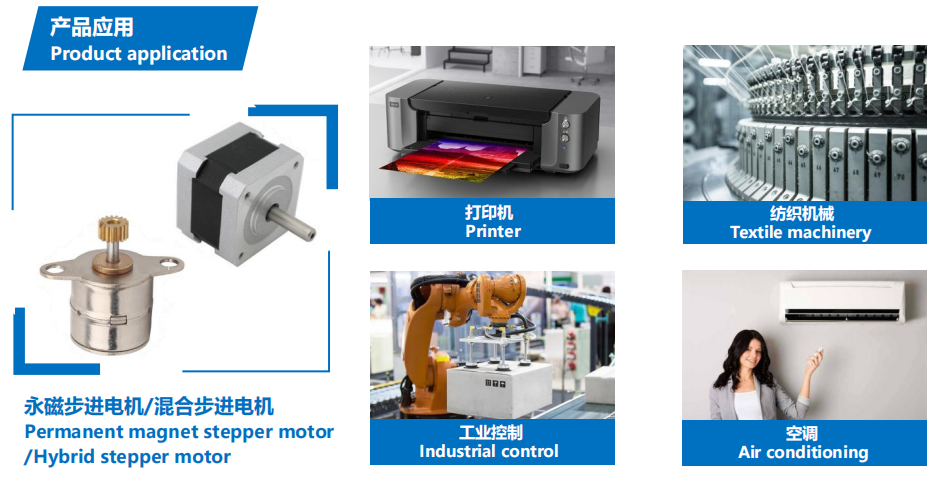
การประยุกต์ใช้มอเตอร์สเต็ปเปอร์ PM
เครื่องพิมพ์,
เครื่องจักรสิ่งทอ
การควบคุมอุตสาหกรรม
สุขภัณฑ์,
วาล์วควบคุมอุณหภูมิ
ก๊อกน้ำร้อน
การปรับอุณหภูมิน้ำอัตโนมัติ
กุญแจประตู
เครื่องปรับอากาศ
วาล์วเครื่องกรองน้ำ ฯลฯ
หลักการทำงานของมอเตอร์สเต็ปเปอร์
การขับเคลื่อนของมอเตอร์สเต็ปเปอร์ถูกควบคุมด้วยซอฟต์แวร์ เมื่อมอเตอร์ต้องการหมุน ระบบขับเคลื่อนก็จะทำงาน
ส่งสัญญาณพัลส์ไปยังมอเตอร์สเต็ปเปอร์ สัญญาณพัลส์เหล่านี้จะจ่ายพลังงานให้กับมอเตอร์สเต็ปเปอร์ตามลำดับที่กำหนดไว้
ทำให้โรเตอร์ของมอเตอร์หมุนไปในทิศทางที่กำหนด (ตามเข็มนาฬิกาหรือทวนเข็มนาฬิกา) เพื่อที่จะ
เพื่อให้มอเตอร์หมุนได้อย่างถูกต้อง ในแต่ละครั้งที่มอเตอร์ได้รับพัลส์จากไดรเวอร์ มันจะหมุนด้วยมุมหนึ่งขั้น (ในระบบขับเคลื่อนแบบเต็มขั้น) และมุมการหมุนของมอเตอร์จะถูกกำหนดโดยจำนวนพัลส์ที่ส่งมาและมุมหนึ่งขั้น
ระยะเวลานำส่ง
หากเรามีสินค้าตัวอย่างในสต็อก เราสามารถจัดส่งตัวอย่างได้ภายใน 3 วัน
หากเราไม่มีสินค้าตัวอย่างในสต็อก เราจำเป็นต้องผลิตขึ้นมาใหม่ ซึ่งใช้เวลาในการผลิตประมาณ 20 วันทำการ
สำหรับการผลิตจำนวนมาก ระยะเวลานำส่งขึ้นอยู่กับปริมาณการสั่งซื้อ
บรรจุภัณฑ์
ตัวอย่างสินค้าจะถูกบรรจุในฟองน้ำและกล่องกระดาษ จากนั้นจัดส่งโดยบริการจัดส่งด่วน
ในการผลิตจำนวนมาก มอเตอร์จะถูกบรรจุในกล่องกระดาษลูกฟูกโดยมีฟิล์มใสห่อหุ้มด้านนอก (จัดส่งทางอากาศ)
หากขนส่งทางทะเล สินค้าจะถูกบรรจุลงบนพาเลท

วิธีการชำระเงินและเงื่อนไขการชำระเงิน
โดยทั่วไปแล้ว สำหรับการส่งตัวอย่างสินค้า เรารับชำระเงินผ่าน PayPal หรือ Alibaba
สำหรับการผลิตจำนวนมาก เรารับชำระเงินผ่านการโอนเงินทางธนาคาร (T/T)
สำหรับการส่งตัวอย่างสินค้า เราจะเรียกเก็บเงินเต็มจำนวนก่อนเริ่มการผลิต
สำหรับการผลิตจำนวนมาก เราสามารถรับชำระเงินล่วงหน้า 50% ก่อนการผลิต และเรียกเก็บเงินส่วนที่เหลือ 50% ก่อนการจัดส่ง
หลังจากที่เราร่วมมือกันสั่งซื้อสินค้ามากกว่า 6 ครั้ง เราสามารถเจรจาเงื่อนไขการชำระเงินอื่นๆ ได้ เช่น การชำระเงินเมื่อเห็นเอกสาร (A/S - After Sight)
วิธีการชำระเงินและเงื่อนไขการชำระเงิน
1. เหตุผลในการใช้สเต็ปเปอร์มอเตอร์ร่วมกับเกียร์ทดรอบ:
มอเตอร์สเต็ปเปอร์จะสลับความถี่ของกระแสเฟสของสเตเตอร์ เช่น การเปลี่ยนพัลส์อินพุตของวงจรขับมอเตอร์สเต็ปเปอร์ ทำให้เกิดการเคลื่อนที่ด้วยความเร็วต่ำ เมื่อมอเตอร์สเต็ปเปอร์ทำงานด้วยความเร็วต่ำ ขณะรอคำสั่งก้าว โรเตอร์จะหยุดนิ่ง การก้าวด้วยความเร็วต่ำจะทำให้ความเร็วผันผวนมาก ในขณะนี้ เช่น การเปลี่ยนไปทำงานด้วยความเร็วสูง อาจช่วยแก้ปัญหาความเร็วผันผวนได้ แต่แรงบิดจะไม่เพียงพอ กล่าวคือ ความเร็วต่ำจะทำให้แรงบิดผันผวน และความเร็วสูงจะทำให้แรงบิดไม่เพียงพอ จึงจำเป็นต้องใช้ตัวลดความเร็ว




