




มอเตอร์สเต็ปเปอร์ขนาดเล็ก 20 มม. สามารถใช้งานร่วมกับเกียร์ทดรอบได้
คำอธิบาย
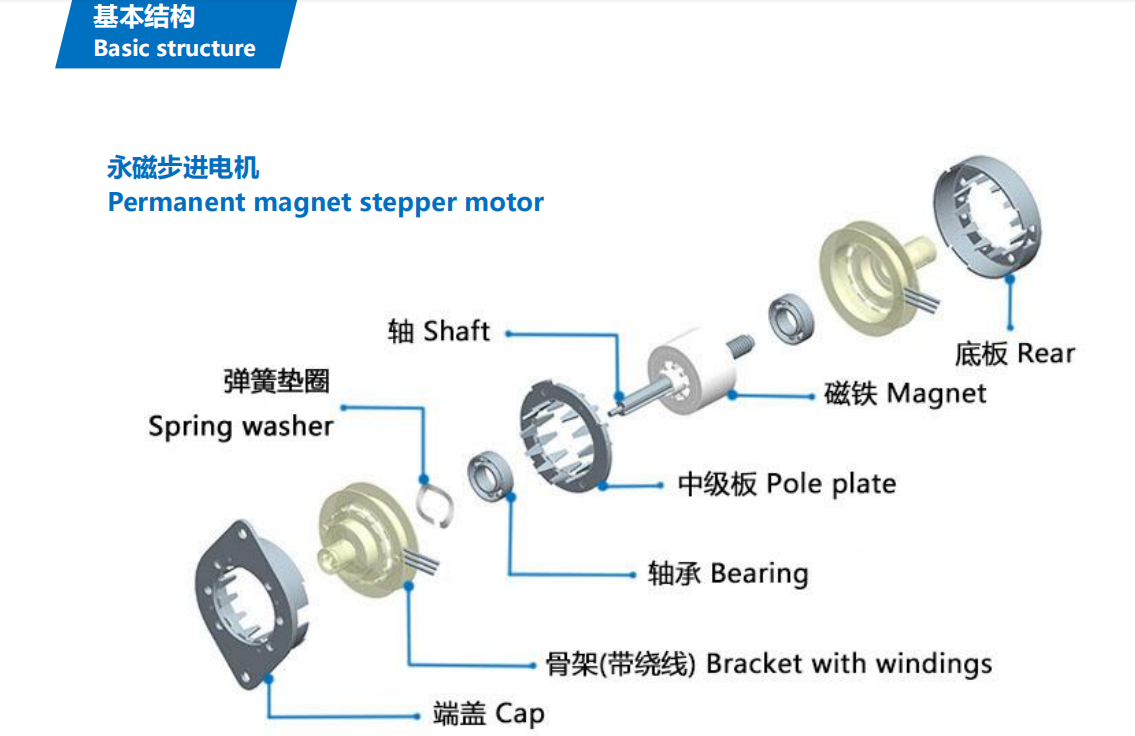
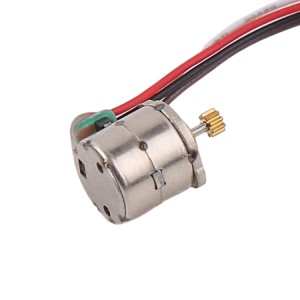
มอเตอร์สเต็ปเปอร์แม่เหล็กถาวรนี้มีเส้นผ่านศูนย์กลาง 20 มม. มีแรงบิด 60 กรัม-เซนติเมตร และสามารถหมุนด้วยความเร็วสูงสุด 3000 รอบต่อนาที
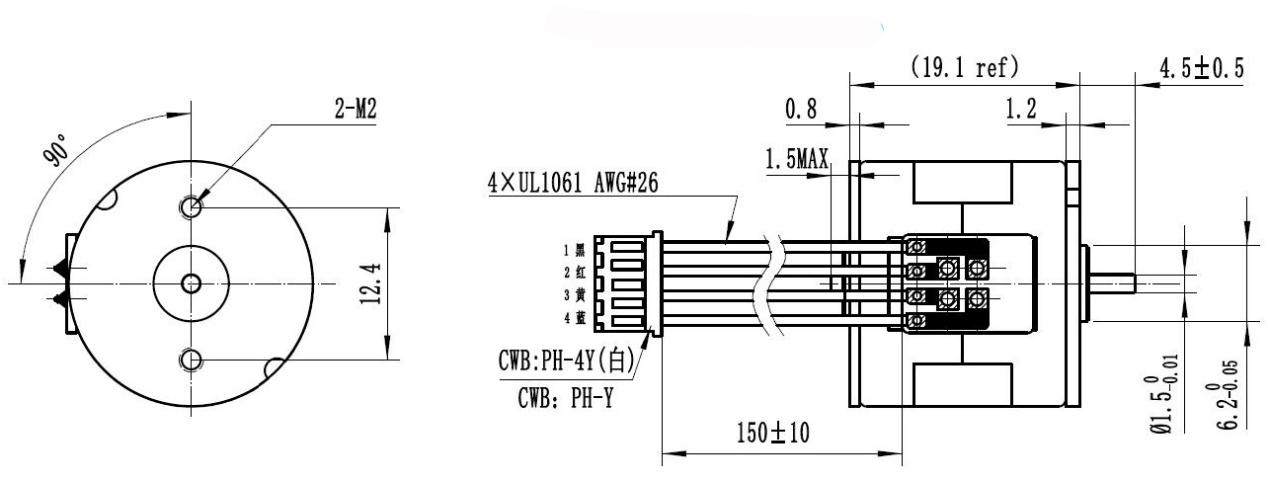
มอเตอร์นี้สามารถติดตั้งร่วมกับเกียร์ได้ โดยมุมการหมุนต่อขั้นของมอเตอร์อยู่ที่ 18 องศา หรือ 20 ขั้นต่อการหมุนหนึ่งรอบ เมื่อติดตั้งเกียร์แล้ว ความละเอียดของมุมการหมุนที่เกิดจากการลดความเร็วของมอเตอร์จะอยู่ที่ 0.05~6 องศา เหมาะสำหรับความต้องการในการควบคุมตำแหน่งการหมุนอย่างแม่นยำหลายด้าน
ความต้านทานของขดลวดมอเตอร์อยู่ที่ 9 โอห์มต่อเฟส และออกแบบมาสำหรับแรงดันขับต่ำ (ประมาณ 5 โวลต์ DC) หากลูกค้าต้องการขับมอเตอร์ด้วยแรงดันที่สูงขึ้น เราสามารถปรับความต้านทานของขดลวดให้เหมาะสมได้
นอกจากนี้ บนฝาครอบมอเตอร์ยังมีสกรู M2 สองตัว ซึ่งใช้สำหรับยึดกับกล่องเกียร์ ลูกค้ายังสามารถใช้สกรูเหล่านี้เพื่อยึดมอเตอร์นี้กับชิ้นส่วนอื่นๆ ได้อีกด้วย
หัวต่อมีระยะห่าง 2.0 มม. (PHR-4) และเราสามารถเปลี่ยนเป็นชนิดอื่นได้หากลูกค้าต้องการ
ดังนั้น ผลิตภัณฑ์นี้จึงสามารถใช้ในงานที่ต้องการการควบคุมตำแหน่งที่แม่นยำได้ โดยทั่วไปสามารถใช้ในอุปกรณ์ทางการแพทย์ เครื่องพิมพ์ อุปกรณ์อัตโนมัติ หุ่นยนต์ ฯลฯ

พารามิเตอร์
| ประเภทมอเตอร์ | มอเตอร์สเต็ปเปอร์ไมโครแบบไบโพลาร์ |
| จำนวนเฟส | เฟส 2 |
| มุมขั้นบันได | 18°/ขั้น |
| ความต้านทานขดลวด (25℃) | 10Ω หรือ 31Ω/เฟส |
| แรงดันไฟฟ้า | 6V DC |
| โหมดการขับขี่ | 2-2 |
| ความถี่เริ่มต้นสูงสุด | 900 เฮิรตซ์ (ขั้นต่ำ) |
| ความถี่ตอบสนองสูงสุด | 1200 เฮิรตซ์ (ขั้นต่ำ) |
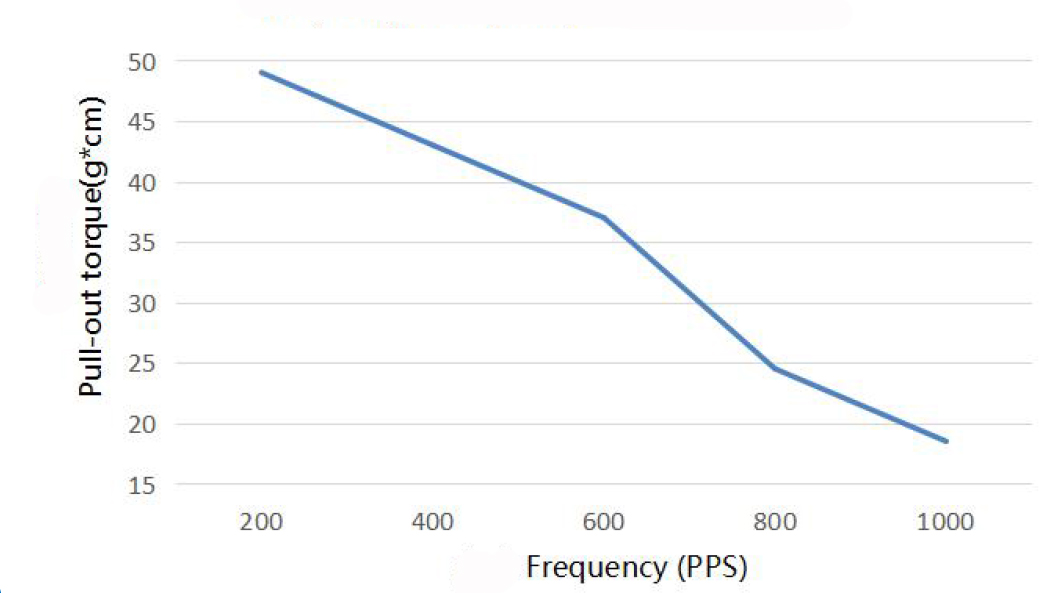
| แรงบิดดึงออก | 25 กรัม/ซม. (600 PPS) |
แบบร่างการออกแบบ
แผนภาพแรงบิดเทียบกับความถี่
การประยุกต์ใช้มอเตอร์สเต็ปเปอร์แบบไฮบริด
คุณสมบัติและข้อดี
1. การกำหนดตำแหน่งที่มีความแม่นยำสูง
เนื่องจากสเต็ปเปอร์มอเตอร์เคลื่อนที่ด้วยขั้นตอนที่แม่นยำและทำซ้ำได้ จึงเหมาะอย่างยิ่งสำหรับการใช้งานที่ต้องการความแม่นยำสูง
การกำหนดตำแหน่ง โดยพิจารณาจากจำนวนก้าวที่มอเตอร์เคลื่อนที่
2. การควบคุมความเร็วที่มีความแม่นยำสูง
การเคลื่อนที่แบบเพิ่มทีละน้อยอย่างแม่นยำยังช่วยให้สามารถควบคุมความเร็วในการหมุนสำหรับกระบวนการได้อย่างยอดเยี่ยม
ระบบอัตโนมัติและหุ่นยนต์ ความเร็วในการหมุนถูกกำหนดโดยความถี่ของพัลส์
3. ฟังก์ชันหยุดชั่วคราวและค้างจังหวะ
ด้วยการควบคุมไดรฟ์ มอเตอร์จะมีฟังก์ชันล็อค (มีกระแสไฟฟ้าไหลผ่านขดลวดมอเตอร์ แต่
มอเตอร์ไม่หมุน) และยังคงมีแรงบิดยึดอยู่
4. อายุการใช้งานยาวนานและมีสัญญาณรบกวนทางแม่เหล็กไฟฟ้าต่ำ
มอเตอร์สเต็ปเปอร์ไม่มีแปรงถ่าน และไม่จำเป็นต้องใช้แปรงถ่านในการสลับกระแสเหมือนมอเตอร์แบบมีแปรงถ่าน
มอเตอร์กระแสตรง (DC motor) ไม่มีแรงเสียดทานจากแปรงถ่าน ทำให้มีอายุการใช้งานยาวนานขึ้น ไม่มีประกายไฟ และลดการรบกวนทางแม่เหล็กไฟฟ้า
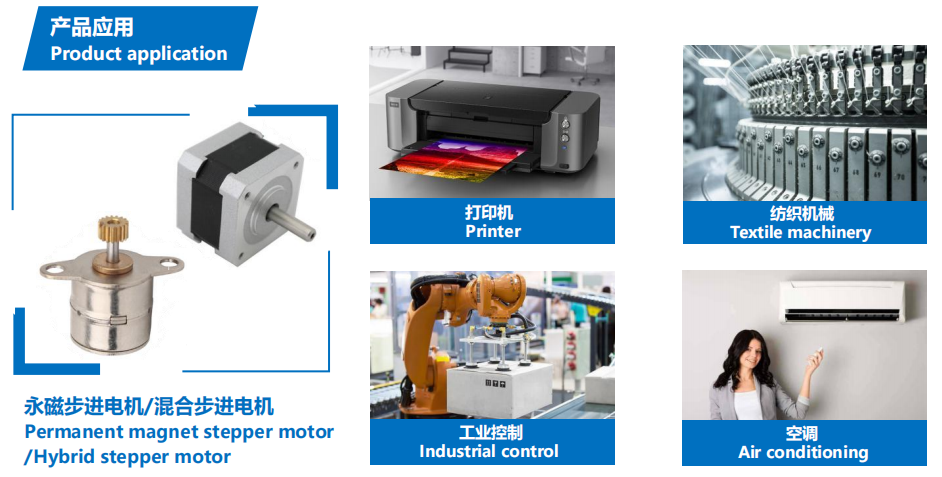
การประยุกต์ใช้มอเตอร์สเต็ปเปอร์ขนาดเล็ก
เครื่องพิมพ์
เครื่องจักรสิ่งทอ
การควบคุมอุตสาหกรรม
เครื่องปรับอากาศ
หลักการทำงานของมอเตอร์สเต็ปเปอร์
การขับเคลื่อนของมอเตอร์สเต็ปเปอร์ถูกควบคุมด้วยซอฟต์แวร์ เมื่อมอเตอร์ต้องการหมุน ระบบขับเคลื่อนก็จะทำงาน
ส่งสัญญาณพัลส์ไปยังมอเตอร์สเต็ปเปอร์ สัญญาณพัลส์เหล่านี้จะจ่ายพลังงานให้กับมอเตอร์สเต็ปเปอร์ตามลำดับที่กำหนดไว้
ทำให้โรเตอร์ของมอเตอร์หมุนไปในทิศทางที่กำหนด (ตามเข็มนาฬิกาหรือทวนเข็มนาฬิกา) เพื่อที่จะ
เพื่อให้มอเตอร์หมุนได้อย่างถูกต้อง ในแต่ละครั้งที่มอเตอร์ได้รับพัลส์จากไดรเวอร์ มันจะหมุนด้วยมุมหนึ่งขั้น (ในระบบขับเคลื่อนแบบเต็มขั้น) และมุมการหมุนของมอเตอร์จะถูกกำหนดโดยจำนวนพัลส์ที่ส่งมาและมุมหนึ่งขั้น
ระยะเวลานำส่ง
หากเรามีสินค้าตัวอย่างในสต็อก เราสามารถจัดส่งตัวอย่างได้ภายใน 3 วัน
หากเราไม่มีสินค้าตัวอย่างในสต็อก เราจำเป็นต้องผลิตขึ้นมาใหม่ ซึ่งใช้เวลาในการผลิตประมาณ 20 วันทำการ
สำหรับการผลิตจำนวนมาก ระยะเวลานำส่งขึ้นอยู่กับปริมาณการสั่งซื้อ
บรรจุภัณฑ์
ตัวอย่างสินค้าจะถูกบรรจุในฟองน้ำและกล่องกระดาษ จากนั้นจัดส่งโดยบริการจัดส่งด่วน
ในการผลิตจำนวนมาก มอเตอร์จะถูกบรรจุในกล่องกระดาษลูกฟูกโดยมีฟิล์มใสห่อหุ้มด้านนอก (จัดส่งทางอากาศ)
หากขนส่งทางทะเล สินค้าจะถูกบรรจุลงบนพาเลท

วิธีการชำระเงินและเงื่อนไขการชำระเงิน
โดยทั่วไปแล้ว สำหรับการส่งตัวอย่างสินค้า เรารับชำระเงินผ่าน PayPal หรือ Alibaba
สำหรับการผลิตจำนวนมาก เรารับชำระเงินผ่านการโอนเงินทางธนาคาร (T/T)
สำหรับการส่งตัวอย่างสินค้า เราจะเรียกเก็บเงินเต็มจำนวนก่อนเริ่มการผลิต
สำหรับการผลิตจำนวนมาก เราสามารถรับชำระเงินล่วงหน้า 50% ก่อนการผลิต และเรียกเก็บเงินส่วนที่เหลือ 50% ก่อนการจัดส่ง
หลังจากที่เราร่วมมือกันสั่งซื้อสินค้ามากกว่า 6 ครั้ง เราสามารถเจรจาเงื่อนไขการชำระเงินอื่นๆ ได้ เช่น การชำระเงินเมื่อเห็นเอกสาร (A/S - After Sight)
ส่งข้อความของคุณมาถึงเรา:
หมวดหมู่สินค้า
-

มอเตอร์สเต็ปเปอร์ขนาดเล็กแรงบิดสูง 35 มม. สำหรับเครื่องพิมพ์
-

มอเตอร์สเต็ปเปอร์ขนาดเล็ก 12V แม่เหล็กถาวร 20 มม. ...
-

มอเตอร์สเต็ปเปอร์ขนาดเล็ก 15 บิต 2 เฟส 4 สาย 18 องศา...
-
มอเตอร์สเต็ปเปอร์ขนาดเล็ก 8 มม. 2 เฟส 18 องศา ...
-

ไมโครสเต็ปเปอร์มอเตอร์ 3.3V 6 มม. คุณภาพสูง เสียงรบกวนต่ำ...
-

มอเตอร์สเต็ปเปอร์ขนาดเล็ก 10BY 5V เส้นผ่านศูนย์กลาง 10 มม. ...