




มอเตอร์สเต็ปเปอร์ขนาดเล็ก 10BY 5V เส้นผ่านศูนย์กลาง 10 มม. มอเตอร์สเต็ปเปอร์ PM
คำอธิบาย
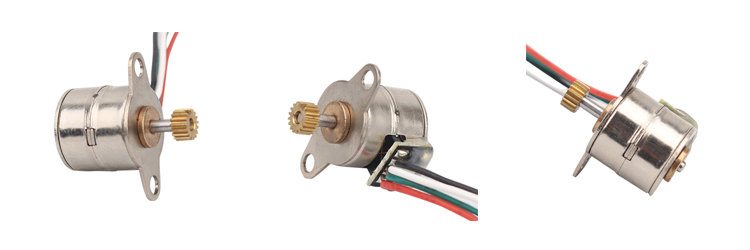
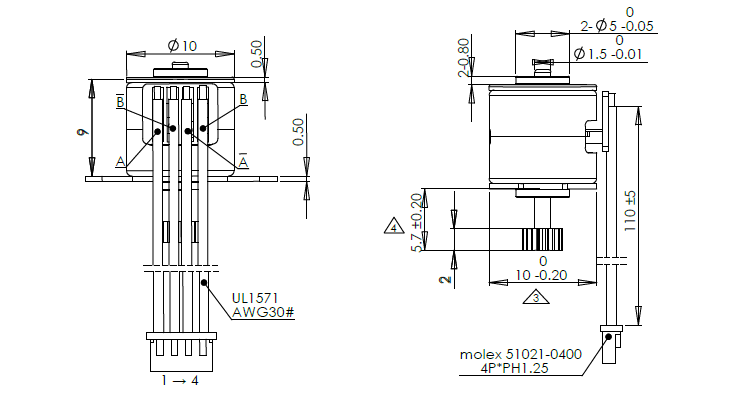
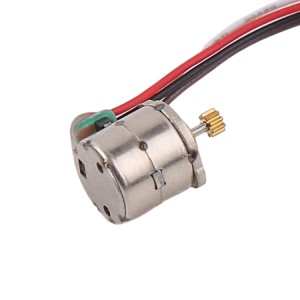
VSM1070 เป็นมอเตอร์สเต็ปปิ้งขนาดเล็กคุณภาพสูงเสียงรบกวนต่ำ มีเส้นผ่านศูนย์กลาง 10 มม. ความสูง 10 มม. ระยะห่างระหว่างรูยึด 14 มม. และความสูงของเพลาส่งกำลัง 5.7 มม. ความสูงของเพลาส่งกำลังสามารถปรับแต่งได้ตามความต้องการในการติดตั้งของลูกค้า เพลาส่งกำลังของมอเตอร์แบบมาตรฐานจะติดตั้งเฟืองทองแดง (โมดูลเฟือง 0.2 จำนวนฟัน 17 ซี่ และความหนาของเฟือง 2 มม.) เฟืองก็สามารถปรับแต่งได้ตามความต้องการในการติดตั้งของลูกค้าเช่นกัน
วิธีการเชื่อมต่อมอเตอร์คือ การเชื่อมต่อด้วยสายไฟ หรือแบบเข็มเปลือย, FPC ฯลฯ สามารถปรับแต่งได้ตามต้องการ
เนื่องจากมีขนาดเล็ก ความแม่นยำสูง ควบคุมง่าย และคุณสมบัติที่ยอดเยี่ยมอื่นๆ มอเตอร์สเต็ปปิ้งขนาดเล็กนี้จึงถูกนำไปใช้อย่างแพร่หลายในกล้องถ่ายรูป เครื่องมือทางแสง เลนส์ อุปกรณ์ทางการแพทย์ที่มีความแม่นยำสูง และสาขาอื่นๆ
พารามิเตอร์
| ชื่อผลิตภัณฑ์ | มอเตอร์สเต็ปเปอร์ 10 มม. |
| แบบอย่าง | วีเอสเอ็ม1070 |
| ความถี่เริ่มต้นสูงสุด | อย่างน้อย 800 PPS (ที่ 5.0 V DC) |
| ความถี่การหมุนสูงสุด | อย่างน้อย 1100 PPS (ที่ 5.0 V DC) |
| ดึงแรงบิดเข้ามา | 5.4 gf-cm ขั้นต่ำ (ที่ 500 PPS, 5.0 V DC) |
| ดึงแรงบิดออก | 6.0 gf-cm ขั้นต่ำ (ที่ 500 PPS, 5.0 V DC) |
| ระดับฉนวนกันความร้อน | คลาส E สำหรับขดลวด |
| ความแข็งแรงของฉนวน | ไฟฟ้ากระแสสลับ 100 โวลต์ เป็นเวลาหนึ่งวินาที |
| ความต้านทานฉนวน | 1 เมกะโอห์ม (DC 100 V) |
| ช่วงอุณหภูมิการทำงาน | -10 ถึง +60 ℃ |
| บริการ OEM และ ODM | มีอยู่ |
แบบร่างการออกแบบ
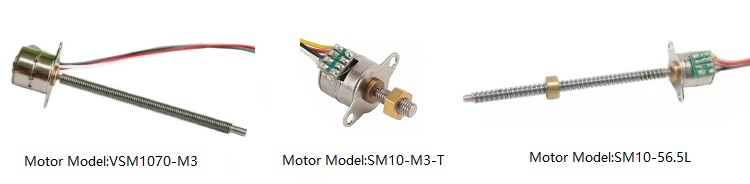
ตัวอย่างของประเภทเดียวกัน
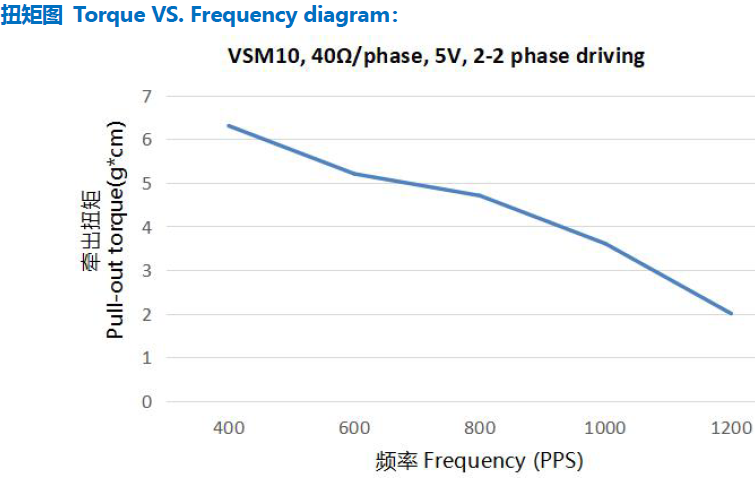
เกี่ยวกับแผนภาพแรงบิดของมอเตอร์สเต็ปเปอร์ขนาดเล็ก
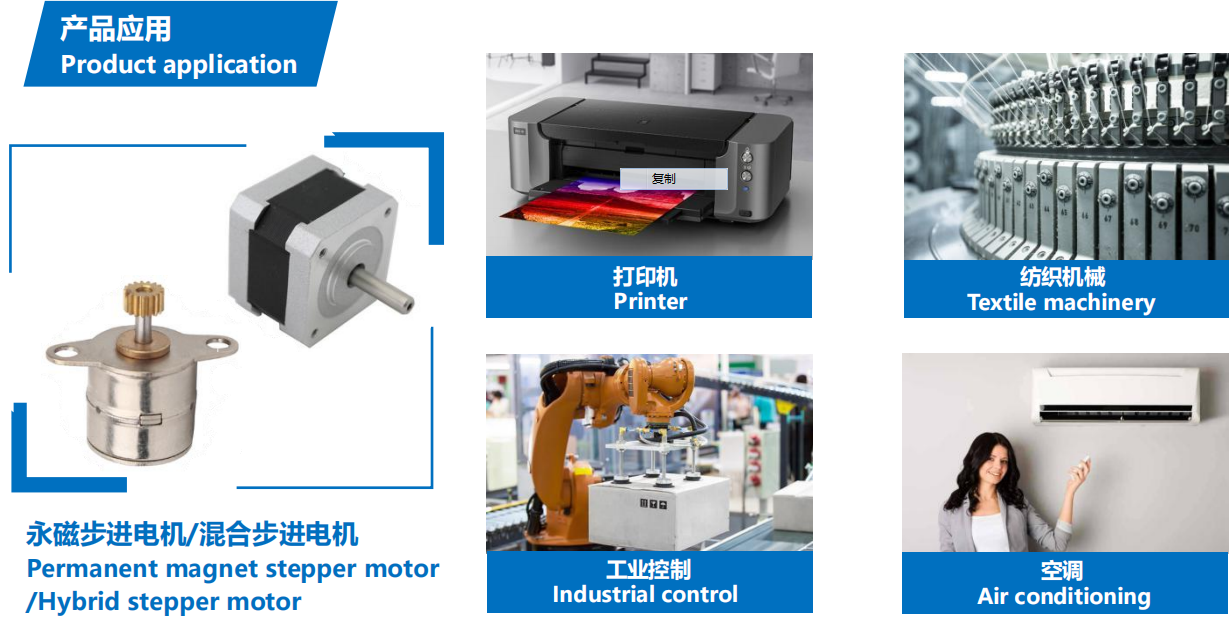
การใช้งานเกี่ยวกับมอเตอร์สเต็ปเปอร์ขนาดเล็ก
มอเตอร์สเต็ปเปอร์ขนาดเล็กของเราโดยทั่วไปมีมุมการหมุนต่อขั้น 18 องศา (การขับเคลื่อนแบบเต็มขั้น)
นั่นหมายความว่าต้องเดิน 20 ครั้งจึงจะหมุนได้หนึ่งรอบ
มุมการหมุนของมอเตอร์นั้นสัมพันธ์กับการออกแบบภายในของสเตเตอร์
เรามีมอเตอร์สเต็ปเปอร์ขนาดเล็กที่มีเส้นผ่านศูนย์กลางแตกต่างกัน และแรงบิดของมอเตอร์จะสัมพันธ์กับขนาดของมัน
ต่อไปนี้คือความสัมพันธ์ระหว่างเส้นผ่านศูนย์กลางของมอเตอร์และแรงบิด (ที่ความถี่การทำงานที่เหมาะสม และแรงดันไฟฟ้าที่กำหนด):
มอเตอร์ขนาด 6 มม.: น้ำหนักประมาณ 1 กรัม*ซม.
มอเตอร์ขนาด 8 มม.: ประมาณ 3 กรัม*ซม.
มอเตอร์ขนาด 10 มม.: น้ำหนักประมาณ 5 กรัม*ซม.
มอเตอร์ขนาด 15 มม.: น้ำหนักประมาณ 15 กรัม*ซม.
มอเตอร์ขนาด 20 มม.: น้ำหนักประมาณ 40 กรัม*ซม.
แอปพลิเคชัน
ความเร็วของมอเตอร์ถูกกำหนดโดยความถี่ในการขับเคลื่อน และไม่เกี่ยวข้องกับภาระ (เว้นแต่ว่ามอเตอร์จะสูญเสียจำนวนรอบการหมุน)
เนื่องจากมอเตอร์สเต็ปเปอร์สามารถควบคุมความเร็วได้อย่างแม่นยำสูง ด้วยการควบคุมการก้าวเดินจากไดรเวอร์ คุณจึงสามารถควบคุมตำแหน่งและความเร็วได้อย่างแม่นยำมาก ด้วยเหตุนี้ มอเตอร์สเต็ปเปอร์จึงเป็นมอเตอร์ที่ได้รับความนิยมสำหรับงานควบคุมการเคลื่อนที่ที่ต้องการความแม่นยำสูงหลายประเภท
บริการปรับแต่ง
การออกแบบมอเตอร์สามารถปรับเปลี่ยนได้ตามความต้องการของลูกค้า ซึ่งรวมถึง:
ขนาดเส้นผ่านศูนย์กลางของมอเตอร์: เรามีมอเตอร์ขนาดเส้นผ่านศูนย์กลาง 6 มม., 8 มม., 10 มม., 15 มม. และ 20 มม.
ค่าความต้านทานของขดลวด/แรงดันไฟฟ้าที่กำหนด: ค่าความต้านทานของขดลวดสามารถปรับได้ และยิ่งค่าความต้านทานสูง แรงดันไฟฟ้าที่กำหนดของมอเตอร์ก็จะยิ่งสูงขึ้น
การออกแบบโครงยึด/ความยาวสกรูนำ: หากลูกค้าต้องการให้โครงยึดมีความยาวหรือสั้นกว่าปกติ สามารถปรับแต่งได้ด้วยการออกแบบพิเศษ เช่น รูยึด
แผงวงจรพิมพ์ (PCB) + สายเคเบิล + ขั้วต่อ: การออกแบบ PCB ความยาวสายเคเบิล และระยะห่างของขั้วต่อสามารถปรับได้ และสามารถเปลี่ยนเป็น FPC ได้หากลูกค้าต้องการ
ระยะเวลาในการจัดส่งและข้อมูลบรรจุภัณฑ์
ระยะเวลาในการจัดส่งตัวอย่าง:
มอเตอร์มาตรฐานมีในสต็อก: ส่งภายใน 3 วัน
มอเตอร์มาตรฐานที่ไม่มีในสต็อก: ภายใน 15 วัน
สินค้าสั่งทำพิเศษ: ประมาณ 25-30 วัน (ขึ้นอยู่กับความซับซ้อนของการปรับแต่ง)
ระยะเวลาในการผลิตแม่พิมพ์ใหม่: โดยทั่วไปประมาณ 45 วัน
ระยะเวลาในการผลิตจำนวนมาก: ขึ้นอยู่กับปริมาณการสั่งซื้อ
บรรจุภัณฑ์:
ตัวอย่างสินค้าจะถูกบรรจุในฟองน้ำและกล่องกระดาษ จากนั้นจัดส่งโดยบริการจัดส่งด่วน
ในการผลิตจำนวนมาก มอเตอร์จะถูกบรรจุในกล่องกระดาษลูกฟูกโดยมีฟิล์มใสห่อหุ้มด้านนอก (จัดส่งทางอากาศ)
หากขนส่งทางทะเล สินค้าจะถูกบรรจุลงบนพาเลท

วิธีการจัดส่ง
สำหรับการส่งตัวอย่างสินค้าและการขนส่งทางอากาศ เราใช้บริการ Fedex/TNT/UPS/DHL(บริการด่วนใช้เวลา 5-12 วัน)
สำหรับการขนส่งทางทะเล เราใช้ตัวแทนขนส่งของเรา และจัดส่งจากท่าเรือเซี่ยงไฮ้(ระยะเวลาขนส่งทางทะเล 45-70 วัน)
คำถามที่พบบ่อย
คำถามที่พบบ่อย
1. มอเตอร์สเต็ปเปอร์พร้อมชุดเกียร์ทดรอบสำหรับลดความเร็ว:
มอเตอร์สเต็ปเปอร์ที่ติดตั้งร่วมกับกล่องเกียร์ทดรอบ จะให้ความเร็วสูงและแรงบิดต่ำ เมื่อเชื่อมต่อกับกล่องเกียร์ทดรอบ ชุดเฟืองทดรอบภายในกล่องเกียร์จะสร้างการส่งกำลังด้วยอัตราส่วนการลดรอบ ทำให้ความเร็วของมอเตอร์สเต็ปเปอร์ลดลง และยังช่วยเพิ่มแรงบิดในการส่งกำลังเพื่อให้ได้ผลการส่งกำลังที่เหมาะสม ประสิทธิภาพการลดรอบขึ้นอยู่กับอัตราส่วนการลดรอบของกล่องเกียร์ ยิ่งอัตราส่วนการลดรอบสูง ความเร็วของเอาต์พุตก็จะยิ่งต่ำ และในทางกลับกัน
2. การควบคุมความเร็วแบบเอ็กซ์โปเนนเชียลด้วยมอเตอร์สเต็ปเปอร์ทำอย่างไร?
ในการเขียนโปรแกรมซอฟต์แวร์ เส้นโค้งเอ็กซ์โปเนนเชียลจะคำนวณค่าคงที่เวลาและเก็บไว้ในหน่วยความจำของคอมพิวเตอร์ก่อน จากนั้นจึงเลือกค่าที่ชี้ไปยังฟังก์ชันการทำงาน โดยปกติแล้ว เวลาในการเร่งและลดความเร็วของมอเตอร์สเต็ปเปอร์จะอยู่ที่ 300 มิลลิวินาทีขึ้นไป หากใช้เวลาในการเร่งและลดความเร็วสั้นเกินไป สำหรับมอเตอร์สเต็ปเปอร์ส่วนใหญ่ จะทำให้ยากที่จะหมุนด้วยความเร็วสูง
3. ช่วงอุณหภูมิที่เหมาะสมที่มอเตอร์สเต็ปเปอร์จะเกิด:
ระดับความร้อนที่มอเตอร์สามารถเกิดขึ้นได้นั้นขึ้นอยู่กับระดับฉนวนภายในของมอเตอร์เป็นอย่างมาก ฉนวนภายในจะเสียหายก็ต่อเมื่อมีอุณหภูมิสูง (สูงกว่า 130 องศาเซลเซียส) ดังนั้น ตราบใดที่อุณหภูมิภายในไม่เกิน 130 องศาเซลเซียส มอเตอร์จะไม่ทำให้วงแหวนเสียหาย และอุณหภูมิพื้นผิวจะต่ำกว่า 90 องศาเซลเซียส ณ จุดนั้น ดังนั้น อุณหภูมิพื้นผิวของมอเตอร์สเต็ปเปอร์ที่ 70-80 องศาเซลเซียสจึงถือว่าปกติ วิธีการวัดอุณหภูมิแบบง่ายๆ ที่ใช้เทอร์โมมิเตอร์แบบจุด สามารถใช้ตรวจสอบคร่าวๆ ได้ดังนี้: ถ้าเอามือแตะค้างไว้ 1-2 วินาที ไม่เกิน 60 องศาเซลเซียส; ถ้าแค่แตะเบาๆ ประมาณ 70-80 องศาเซลเซียส; ถ้าหยดน้ำลงไปแล้วระเหยอย่างรวดเร็ว เกิน 90 องศาเซลเซียส
ส่งข้อความของคุณมาถึงเรา:
หมวดหมู่สินค้า
-
มอเตอร์สเต็ปเปอร์ขนาดเล็ก 8 มม. 2 เฟส 18 องศา ...
-

มอเตอร์สเต็ปเปอร์ขนาดเล็ก 15 บิต 2 เฟส 4 สาย 18 องศา...
-

มอเตอร์สเต็ปเปอร์ขนาดเล็ก 20 มม. สามารถใช้งานร่วมกับ...
-

มอเตอร์สเต็ปเปอร์ขนาดเล็กแรงบิดสูง 35 มม. สำหรับเครื่องพิมพ์
-

มอเตอร์สเต็ปเปอร์ขนาดเล็ก 12V แม่เหล็กถาวร 20 มม. ...
-

ไมโครสเต็ปเปอร์มอเตอร์ 3.3V 6 มม. คุณภาพสูง เสียงรบกวนต่ำ...